The Assistive Technology Project
Background and Problem Statement
In the United States alone, seven million people live with vision impairment or blindness. (Centers for Disease Control and Prevention [CDC], 2024). Mobility devices are the most common way to address impairments like these. White canes are inexpensive mobility tools used by the visually impaired to navigate safely by detecting obstacles, and hazards, as well as provide these individuals with the legal right-of-way in many situations. Despite these benefits, white canes are estimated to only be used by less than ten percent of visually impaired Americans (Perkins School for the Blind, n.d.). This is contributed to by canes falling short in certain aspects of practical use. Namely, the continuous physical effort that is required in order to sweep the cane to physically scan a user’s environment. This mandatory sweeping motion results in the user’s awareness being dependent on the cane making physical contact with an object or obstacle, restricting their awareness to a distance no greater than the length of the cane. The goal of this project is to improve on the effectiveness and convenience of cane usage by building on the traditional white cane’s object detection and feedback system capabilities.

Design Approach
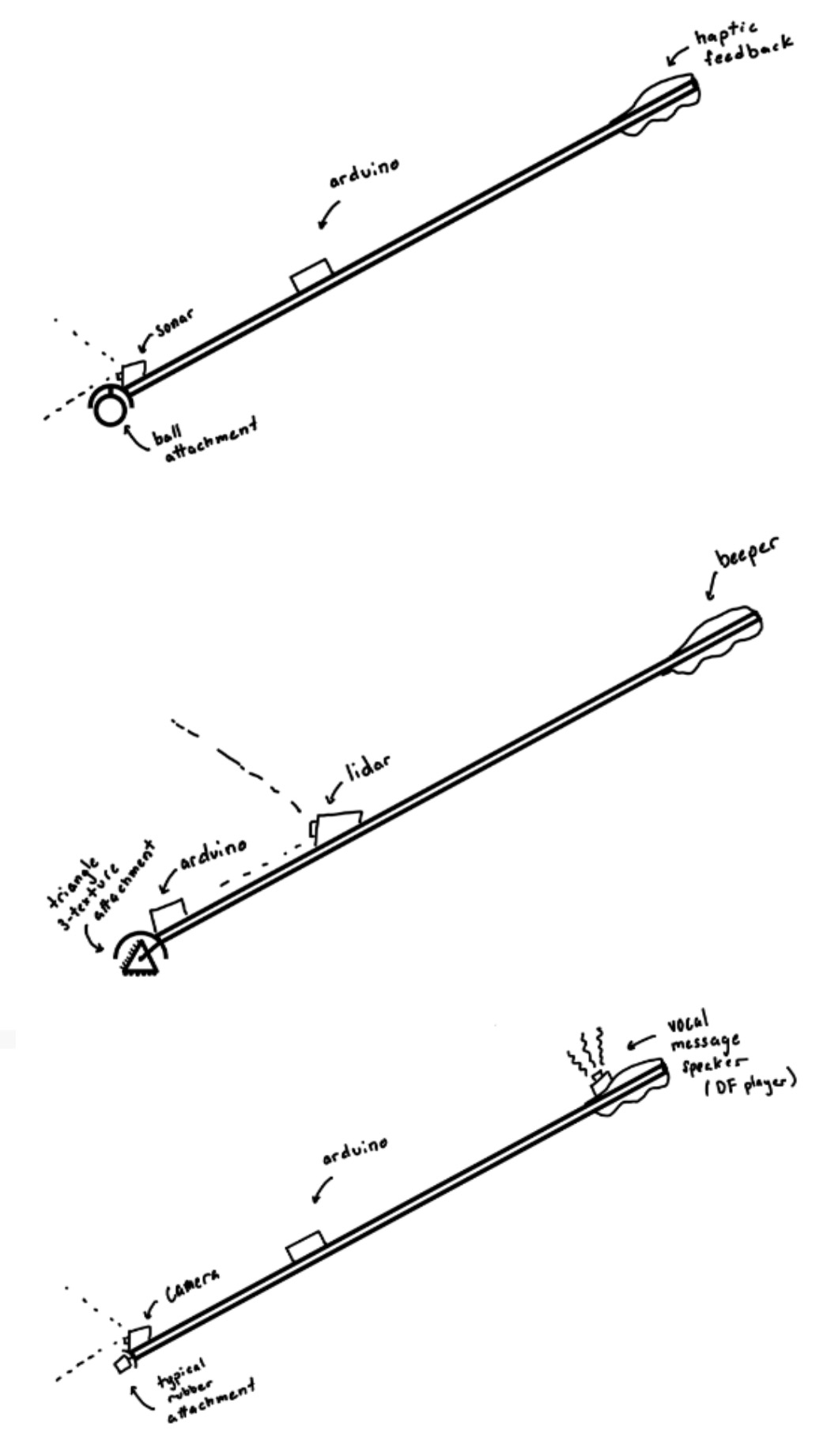
Our design approach began with brainstorming different forms for object detection and user feedback systems. With three possible Arduino positions, detection methods, cane tips, and feedback types there are 81 possible configurations to test in initial prototyping. After our design studies, a cane with sonar object detection and haptic vibration motor were deemed the strongest candidates for future testing. Fusion360 was used to design a cane shaft with the capability to house all hardware and wiring, and feedback was collected from a client who provided our group, Team S'moRRE, with invaluable comments through her experience as a visually impaired person. After continued redesigning and improvements, our final design can be seen below!
Designed Prototype
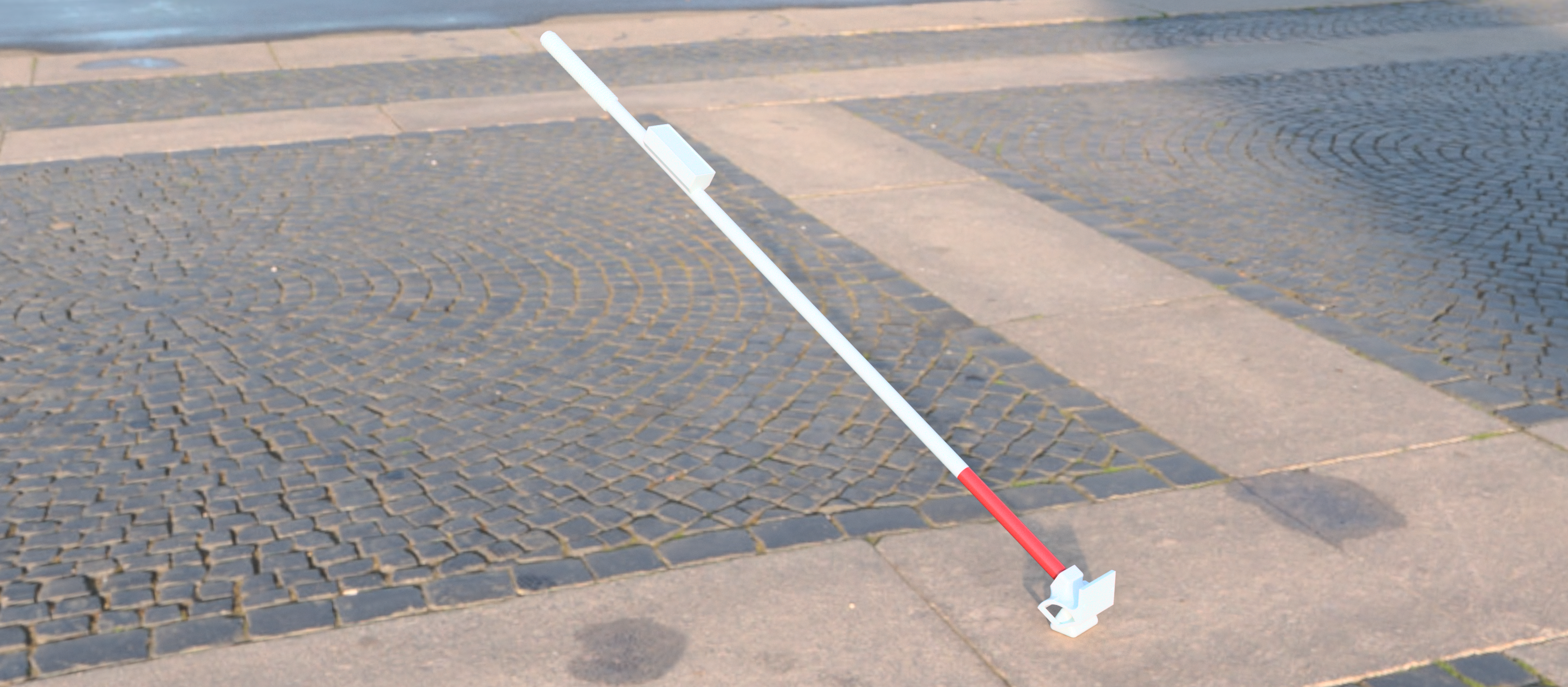
Prototype version 4 of SmartStep involves remote object detection up to one meter away and haptic user feedback. With a tested accuracy greater than ninety-five percent, the cane comes with an adjustable three base tip that can provide different movement surfaces depending on the environment and terrain. The design has been prototyped to be lightweight, weighing 0.45kg, and more durable than previous designs by withstanding up to eighty Newtons of pressure along its shaft.