STEM is taught by Dr. Crowthers. In this part of the class, we make an assistive device for a client with a disability.
Visi-Vest: A Device to Warn VIPs of Above-Waist Obstacles
Project Overview
VIPs, or visually impaired people, face challenges when navigating the world around them.
One such challenge is the inability of common aids such as white canes and guide dogs to alert their users to objects above the waist.
Our project aims to use an ultrasonic sensor to create a wearable vest that detects and alerts the user to any such obstacles.
Problem Statement
Oftentimes, visually impaired persons (VIPs) use white canes or guide dogs to navigate their environment. However, these aids are unable to detect obstacles above waist height. This means that VIPs are at risk of collisions with objects that the cane cannot detect, putting white cane users at risk of injuring themselves without aid from a sighted person.
Engineering Goal
To help visually impaired individuals (VIPs) navigate their environments independently, without fear of being injured by an object they can't see or detect without aid.
Background
Visual Impairments
People in the blind community, including legally blind individuals, blind individuals, and Visually Impaired Persons (VIPs), often face challenges going about their daily life. People within the community have different levels of ability to use their vision. Individuals with no light perception are classified as totally blind, but only make up 15% of the estimated 12 million people in the U.S. living with a visual impairment (Nichols & Zhang, 2023). Individuals who are legally blind have 20/200 or less vision, which means that they would not be able to read anything besides the big “E” on a Snellen chart. Older individuals can develop glaucoma, a disease which damages the optic nerve, and cataracts, cloudy areas on the retina that blur the vision (Nichols & Zhang, 2023). Eye injuries, infectious and noninfectious diseases, nutritional deficiencies, and lazy eye can also cause a person to develop types of blindness (Nichols & Zhang, 2023). Additionally, there are several causes of congenital blindness, including albinism and retinoblastoma (Nichols & Zhang, 2023). Some people may have cloudy or blurry vision, dark spots in their vision, tunnel vision (in which the individual cannot see out of the edges of their eyes), or reverse tunnel vision (in which the individual can only see out of the edges of their eyes) (B. Switzer, L. Do, personal communication, March 24, 2025).
Market Research
When navigating their surroundings, many VIPs use white canes and guide animals to aid them in detecting uneven ground, traffic hazards, and other obstacles at the ground level. Many low-vision individuals that must use a cane are unable to detect objects that lie above their waist. This puts cane users at a continued risk of colliding with above-the-waist objects, such as branches, light fixtures, hanging decorations, signs, etc. (B. Switzer, L. Do, personal communication, March 24, 2025). Protruding objects and doors are also very difficult to navigate with a cane (L. Myska, personal communication, April 13, 2025). Some existing devices fail to address the needs of users such as children, who may be under a certain height and unable to use such devices (NOA, n.d.). Devices may also have prohibitive costs ranging in the thousands, not be commercially available, or have fatal flaws such as directing users into traffic or collisions with another person due to misguided classification algorithms (NOA, n.d., Hersh, 2022, Vorapatratorn, 2021). Many of the current assistive technologies aiming to solve this problem only focus on the technical side of the project, ignoring the user’s experience and comfort (Hersh, 2022). Therefore, the ultimate goal of this device is to help low-vision individuals avoid collisions with objects that they are unable to detect with a cane in a way that requires minimal training and is comfortable to use.
Design Sketches
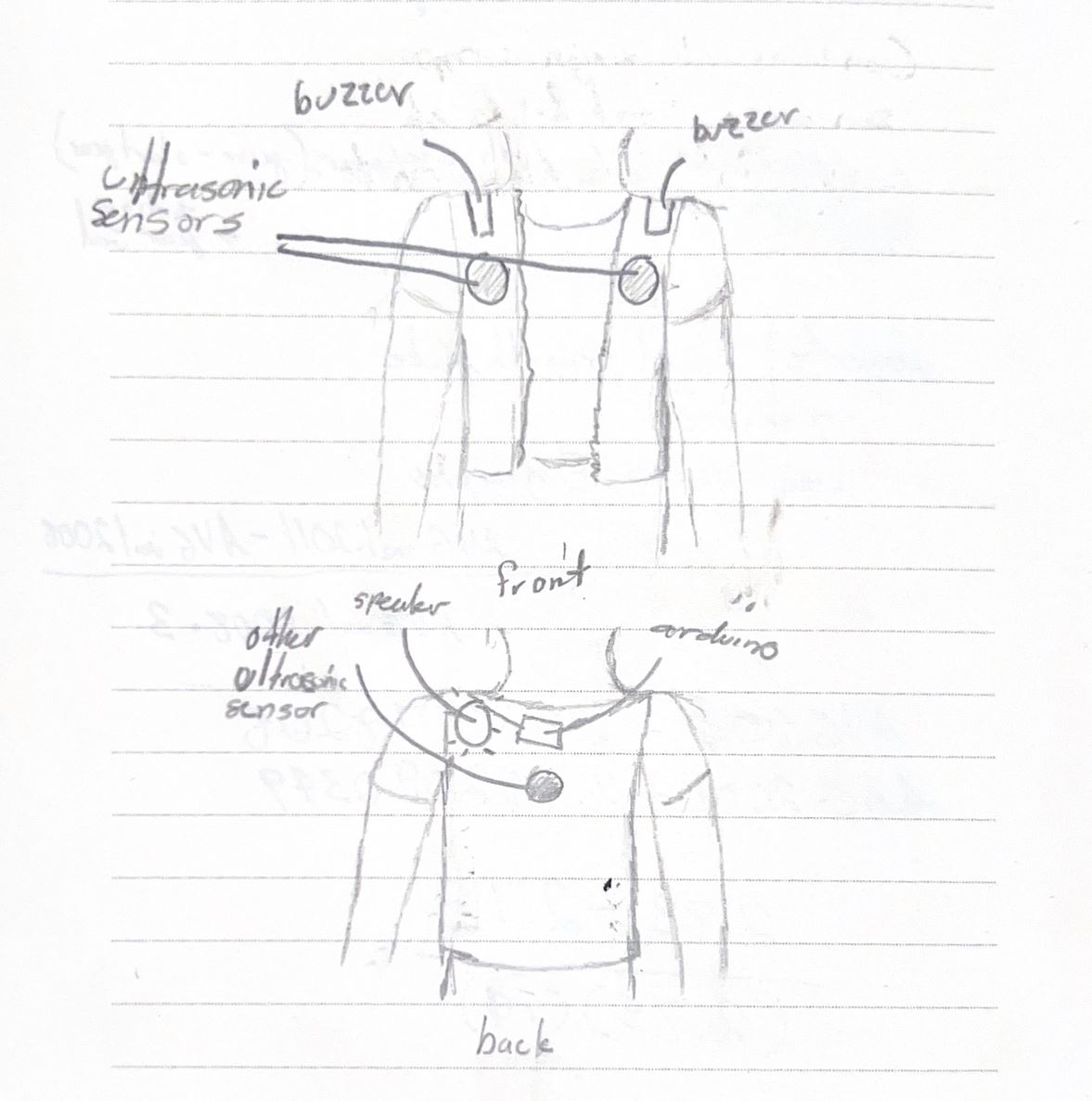
Figure 1: This design connected all components to a safety vest for comfort and easy navigation, but was deemed unwieldy due to the lack of a clear system for attachment of sensors and the lack of protection for fragile components. Additionally, it was determined that long hair would interfere with sensor placement.
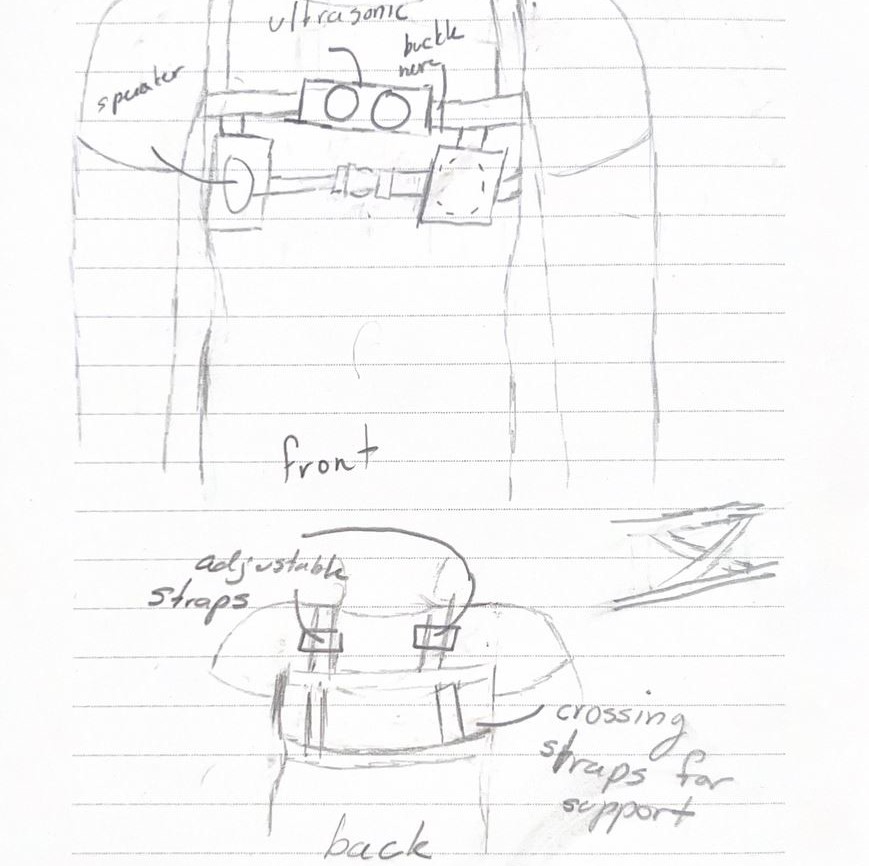
Figure 2: This design used adjustable straps to create a design that could be used by people of different sizes. The components were encased in 3D printed boxes for modularity. However, after talking with a client, it was deemed overly complicated to navigate. It was also determined that it bore an unwanted resemblance to a dog harness.
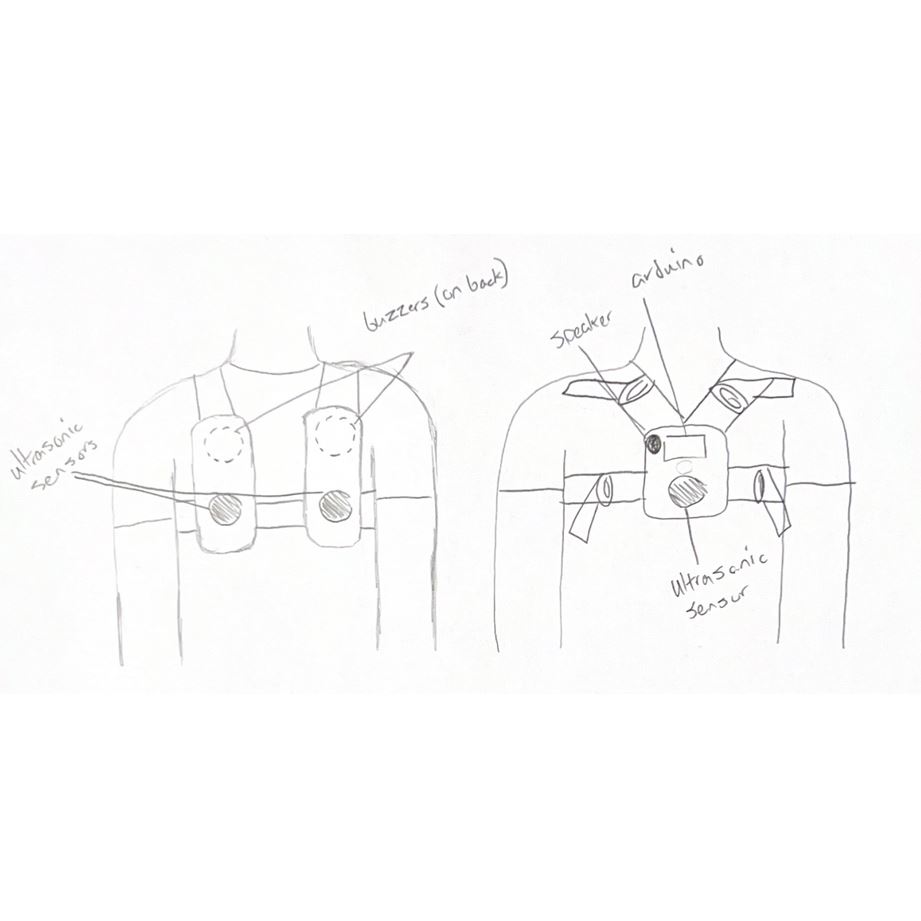
Figure 3: This design holds the ultrasonic sensor, buzzer, and Arduino in large 3D printed modules connected by nylon straps. However, this design was deemed too bulky, looked like a harness, and interfered with long hair due to sensor placement on the back.
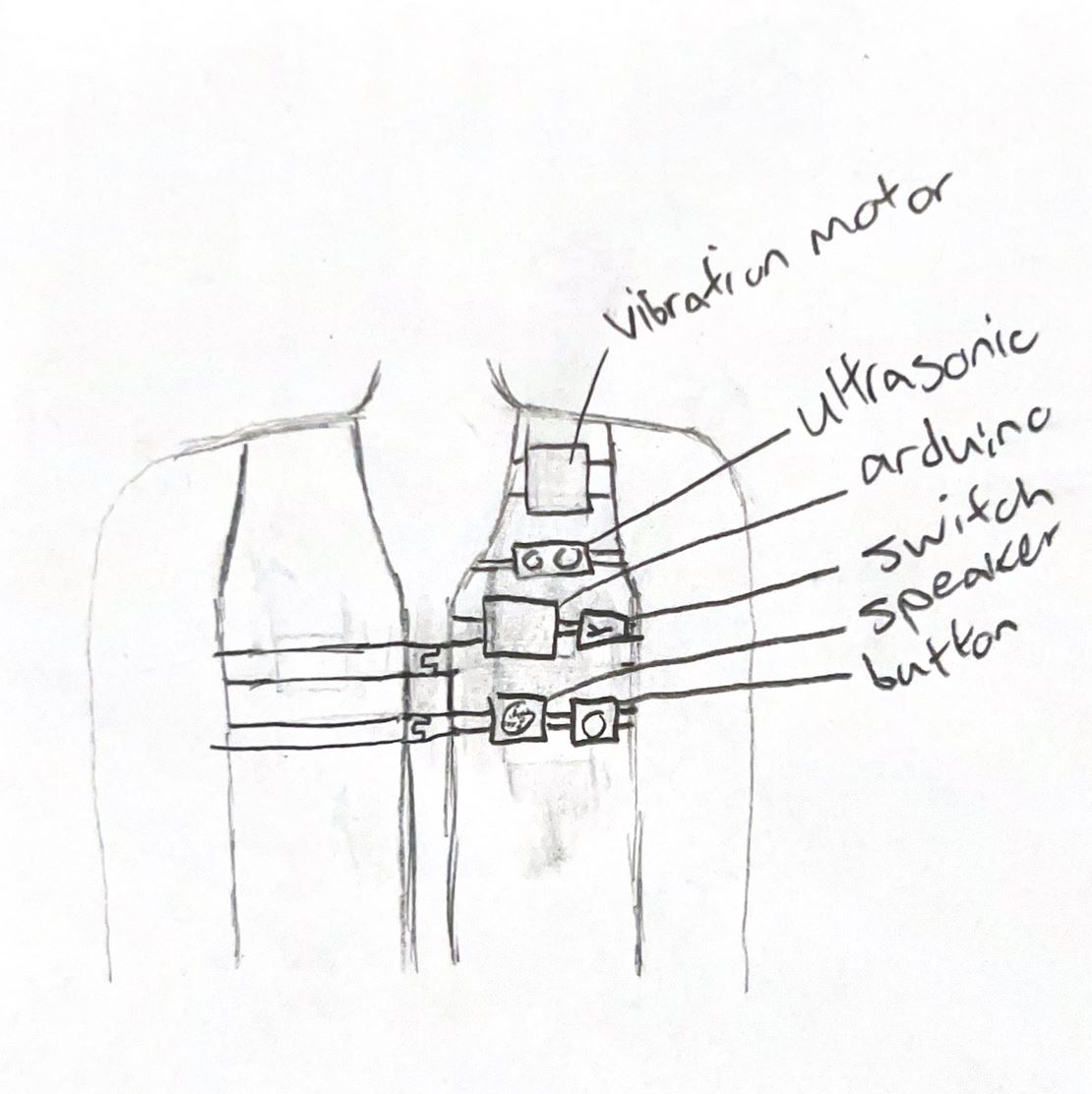
Figure 4: Our final design approach, this iteration utilized a safety vest for comfort and ease of use by VIPs, but retained the modular "strap" system to attach the sensors and other electronic components. These components were protected with individual 3D printed containers designed to hold them safely.
First Prototype
Development
We began by developing holders in CAD for the Arduino, the ultrasonic sensor, the button, and the combined speaker/vibration motor unit.
Each holder has slots on the bottom to slide onto a nylon strap and consists of a box and lid.
The Arduino handles all logic.
For this iteration, we used duct tape to fasten the casings together and to attach the straps to the vest due to time constraints.
Testing
We tested our design by blindfolding group members and having them walk towards various objects.
Our best detection range was at 1 foot out from a whiteboard in the Computer Science room.
The device failed to detect a laptop placed on a table and a door at an angle before the user felt them.
Additionally, due to challenges with the wiring, the vibration motor did not work.
Current Prototype
Development
For this version, we improved upon our previous design by adding latches to all the casings so that they could be snapped around the sensors.
We also added a breadboard due to troubles with the wiring. We used two CAD pieces to attach the breadboard with straps, which were then connected to the main strap.
Additionally, we sewed all straps to the vest for a more professional design.
Testing
We tested our design by blindfolding group members and having them walk towards various objects, as before.
The device was able to detect a wide range of objects, including chairs, doors at various angles, walls, paper towel dispensers, and other group members.
Our best detection range was 2 feet, which was achieved with the wall and the door at several angles.
The vibration motor functioned correctly at this stage.
Instructions
Click below to hear the instructions in an audio format.
References
Abidi, H. M., Siddiquee, A. N., Alkhalefah, H., & Srivastava, V. (2024). A Comprehensive Review of Navigation Systems for Visually Impaired Individuals. Heliyon, 10(11), e31825–e31825. https://doi.org/10.1016/j.heliyon.2024.e31825
Hersh, M. (2022). Wearable Travel Aids for Blind and Partially Sighted People: A Review with a Focus on Design Issues. Sensors, 22(14), 5454. https://doi.org/10.3390/s22145454
Kosowatz, J. (2016, August 4). Wearables help the blind walk. ASME. https://www.asme.org/topics-resources/content/wearables-help-the-blind-walk
Nichols, H., & Zhang, G. (2023, April 24). Types of blindness: Partial, total, congenital, and more. Medical News Today. https://www.medicalnewstoday.com/articles/types-of-blindness#types
Naviband: A navigation headband providing real-time orientation feedback through stereo vibration. (2023). Stanford.edu. https://charm.stanford.edu/ME327/2023-Group9
NOA by biped.ai, your AI mobility companion. biped.ai. (n.d.). https://biped.ai/
Okolo, G. I., Althobaiti, T., & Ramzan, N. (2024). Assistive Systems for Visually Impaired Persons: Challenges and Opportunities for Navigation Assistance. Sensors, 24(11), 3572. https://doi.org/10.3390/s24113572.
Said, Rasha. (2017). Audio navigation system for the visually impaired (U.S. Patent No. 9,726,746). U.S. Patent and Trade-mark Office. https://patents.google.com/patent/US9726746B2
Vorapatratorn, S. (2021). AI-Based Obstacle Detection and Navigation for the Blind using Convolutional Neural Network. 2021 25th International Computer Science and Engineering Conference (ICSEC), 17–22. https://doi.org/10.1109/icsec53205.2021.9684607