Iteration 1
Assistive Technology Project
For STEM 2, we worked in groups to find and help a client with a problem. My group was named "DJ KaLe", and consisted of Jack, the CEO, Karena, the CIO, Donya, the CMO, and I, the CTO.
Client's Problem
Our client, referred to as client VR, experiences the occasional and temporary paralysis of their limbs, oftentimes inhibiting them from actions such as standing or walking. These episodes are made worse when the client is tired or has recently exercised, furthering the limitations put on the client. Partially-aiding designs such as a walking cane or weak motors are not sufficient for the client, as these rely on additional effort from leg muscles.
Design Approach - Iteration 1
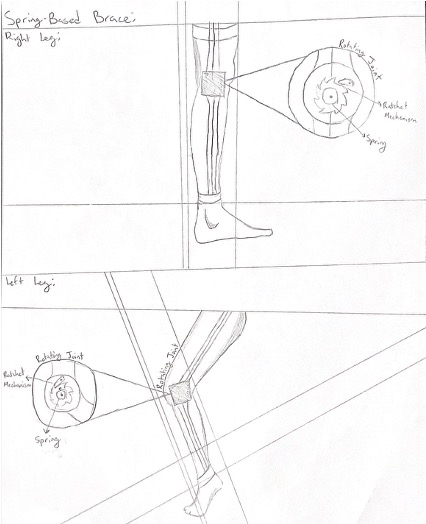
This design focused on a spring based approach, where a ratcheting spring mechanism would be given tension through sitting, and be able to push back and redistribute this force to help with standing. However, the idea was quickly discarded after mathematical modeling of the scenario showed that the caliber of springs required were infeasible to acquire.
Iteration 1
Design Approach - Iteration 2
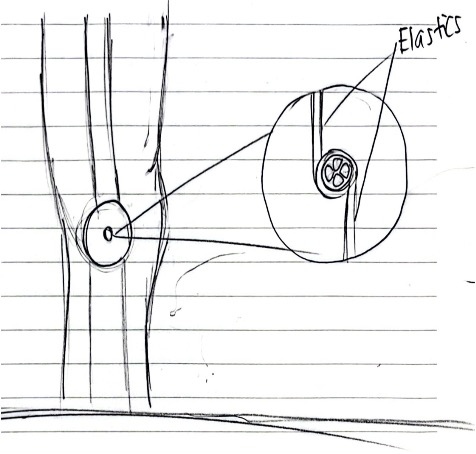
This design focused on an elastic based approach, where an elastic setup would be given tension through sitting, and be able to push back and redistribute this force to help with standing. Although this had a greater potential to provide a force, the idea was also discarded after discovering that it was not feasible to get strong enough bands to reliably lift a person. Also, these bands would have been impossible to disengage, which would have posed a problem for walking.
Iteration 2
Design Approach - Iteration 3
This design was the first to focus on a motor based approach, using affordable motors with a high gear ratio to provide the necessary torque to lift the user. Additionally, the design used a belt transmission design to be able to have a manual switch, allowing the user to manually disengage the transmission of torque. However, the quantity of complicated parts and connections made the design infeasible to manufacture, requiring perfectly machined metal axles and impossible supports. Additionally, the inclusion of worm gears introduced a large factor of friction and other forces, adding a predicted 60% reduction in torque.
Iteration 3

Design Approach - Iteration 4
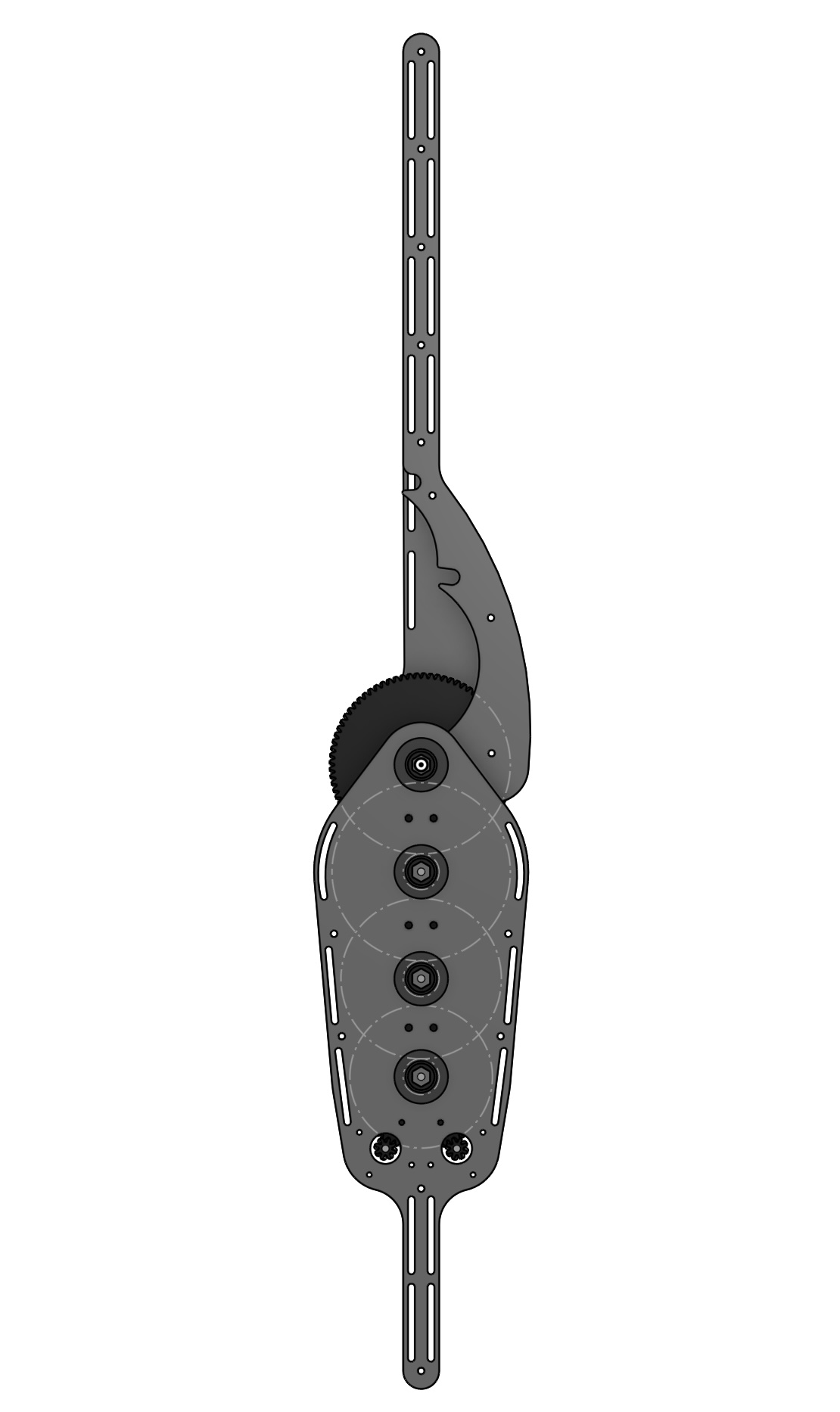
This design, as an improved and sturdier version of version 3, was the final version. With torque transmission fully carried through gears, and a much higher gear ratio of approximately 260:1, the design is much more capable of holding the necessary weight and is feasible to manufacture through use of a CNC and 3d printer.
Iteration 4
Prototype
After modeling the prototype in Onshape, a form of CAD (Computer Aided Design) software, this prototype was manufactured by exporting each designed part to the necessary processing tool, such as fusion, a form of CAM (Computer Aided Machining) for the metal plates, and BambuLabl, a form of 3d printing slicer, for the 3d printed parts. We then cut out and polished the metal parts while printing the other parts, and assembled the assorted parts to form the mechanical prototype. On the side of electrical controls, we set up motor movement and EMG detection during the construction of the design, allowing for the full model to be pieced together. An image of the mechanical side of the design can be seen below.

Assistive Technology Poster
Trouble accessing the document? Click here.