Graphical Abstract
STEM Project
Taught by Dr. Crowthers, this class educates students on independent research and professional communication. Every student works on an independent project of their choosing, learning how to execute a project through research, data collection, and the writing of pieces such as a grant proposal.
Quad Chart
This quad chart gives a summary of the main goals, methods, and preliminary data of my STEM project.
Trouble accessing the document? Click here.
Overview
While skiing, bad conditions and reckless skiers can result in unnecessary accidents, especially due to the lack of active prevention of collisions in the current safety gear. To address the lack of preventative gear, this project explores the use of sensors to enhance ski goggles. Through the use of a VL53L0X lidar sensor with a raspberry pi 4B, lidar accuracy and general patterns are examined, allowing for different complexities of obstacle detection to be created. This is valuable because automated obstacle detection can allow for much safer skiing, and an accurate sensor and system is crucial for obstacle detection.
Abstract
While skiing, reckless skiers and low visibility can result in collisions and injury. All skiers experience difficulties because of this, but beginner skiers are most influenced due to their reduced ability to focus both on skiing and avoiding incoming obstacles. Most current safety measures do not address the prevention of collision, as reckless skiers and bad conditions are unpredictable. The goal of this project was to engineer a new or modified design of ski goggles, utilizing sensors to detect and warn the skier of any possible obstacles. This design had to function in varying weather conditions without significantly obscuring the user’s field of view or otherwise posing a detriment to the quality of skiing. To do this, testing was performed on small-scale lidar sensors, acting as representative sensors for the higher-range sensors required for object detection on the hill. By collecting and comparing recorded distances to true distances, the accuracy at different distances and conditions was determined. With accuracy quickly dropping as range increases, such as an outdoors 200 millimeter RMSE value of 3.619 and 1000 millimeter RMSE value of 6434.250, the results of this experimentation showed a need for additional strategies to combat irregular data.
Keywords: skiing, object detection, lidar, radar, camera, safety, assistive technology
Graphical Abstract
Engineering Problem
Current safety equipment for skiing does not focus enough on preventing collisions, allowing for more injury and making skiing less accessible for novice skiers.
Engineering Goal
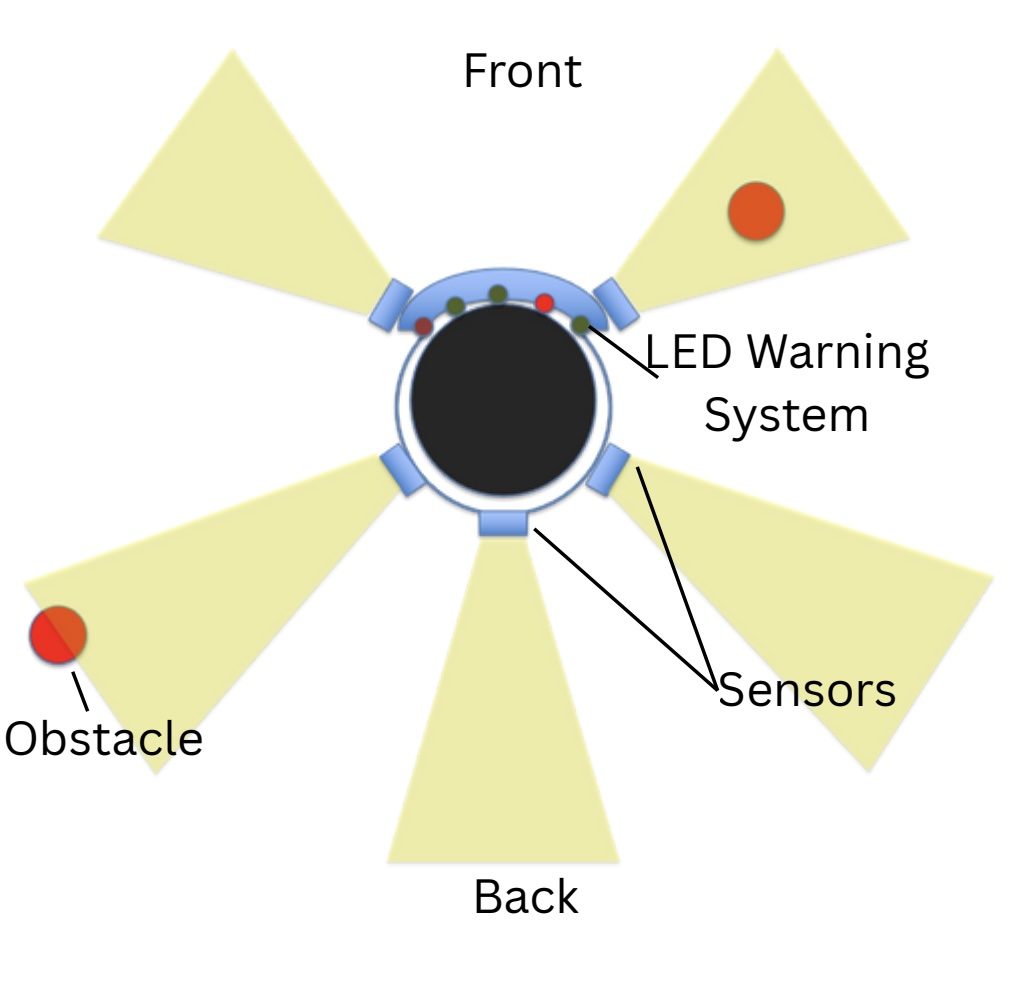
This project aims to explore the feasibility of constructing an improved pair of ski goggles, utilizing sensors to detect and warn the skier of potential obstacles.
Graphical Background
Background
Skiing Injury Rates:
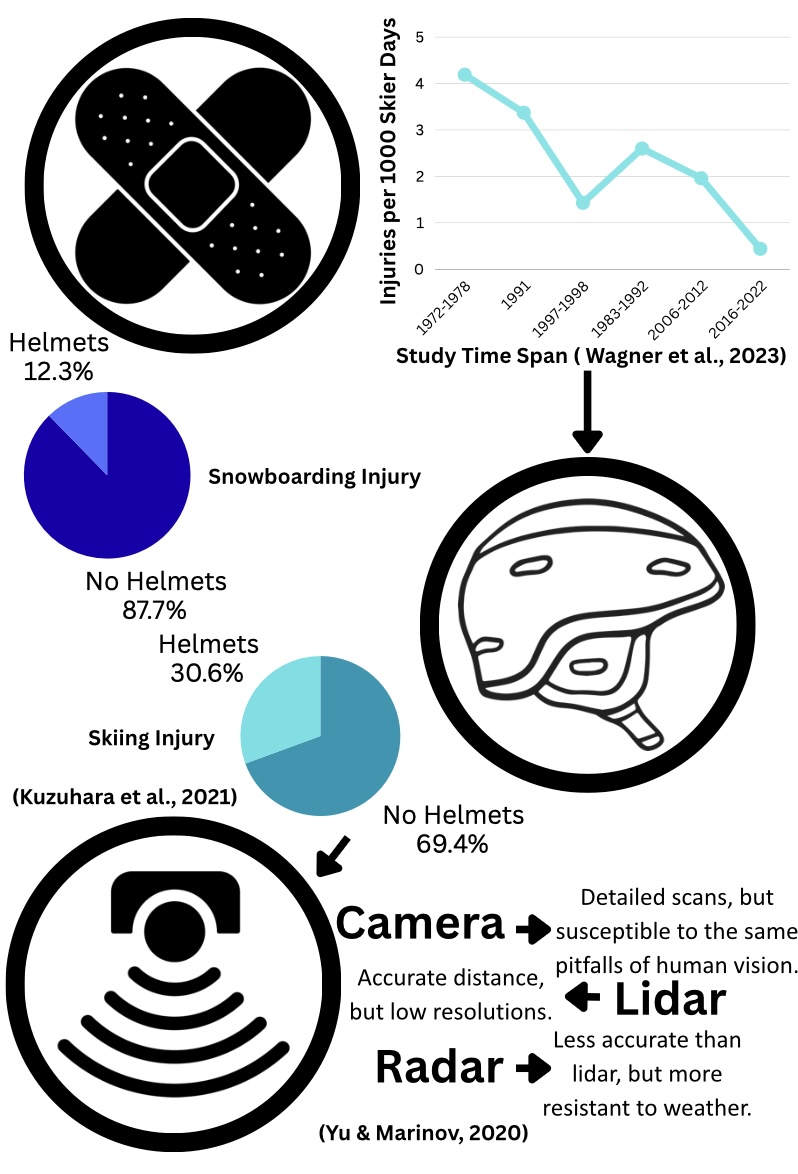
A 2017-2022 study in Austria reported a total 10,143 injuries, or a
rate of 0.44 injuries per 1000 skier days (Wagner et al., 2023). This shows the trend of a decreasing injury rate,
with a 1997-1998 study reporting 1.43 injuries per 1000 skier days (Wagner et al., 2023).
Protective Equipment:
The decrease in injury rates could be due to a greater use of safety
equipment. For instance, 87.7% of snowboarding injuries and 69.4% of skiing injuries in a
Japan study involved people without helmets (Kuzuhara et al., 2021). By increasing the use and effectiveness of safety gear,
injury rates are likely to decrease.
Viable Sensors:
Camera: A type of sensor that records incoming light to create an
image, making very detailed scans while being susceptible to the
same pitfalls of human vision (Yu et Marinov, 2020).
Lidar: A type of sensor that sends out pulses of light to record the
time for the light to detect, accurately measuring distance at the cost
of much lower scan resolutions (Yu et Marinov, 2020).
Radar: Similar to lidar sensors, using a different wavelength of light
to achieve different properties such as a greater resistance to low
visibility environments (Yu et Marinov, 2020).
Graphical Procedure
Procedure
Goal: To determine what sensors to use and how to most efficiently use them.
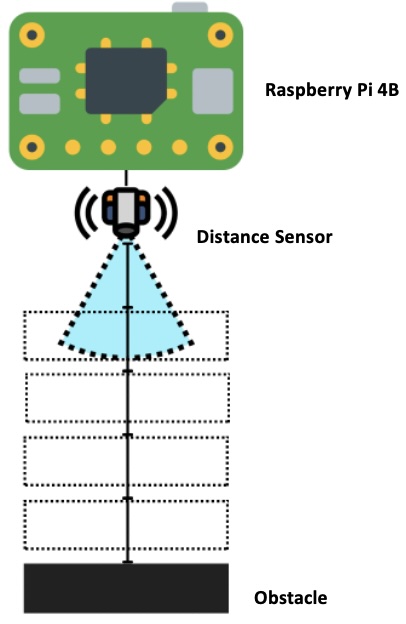
Execution: The test involved taking distance measurements from a lidar sensor, having been hooked up to a raspberry pi 4B. With each distance measurement, a cardboard box was placed at a set distance as an obstacle.
Test 1: VL53L0X Lidar Sensor, Preliminary testing.
Scanning from 50mm to 1000mm, with intervals of 50mm and 10 measurement captures per interval.
Test 2: VL53L0X Lidar Sensor, Indoors.
Same as Test 1, with better electrical connections.
Test 3: VL53L0X Lidar Sensor, Outdoors.
Scanning from 100mm to 1200mm, with intervals of 100mm and 20 measurement captures per interval.
Filtered Test 3: Test 3 data, filtered to get rid of maximum sensor values (8190 or 8191 mm).
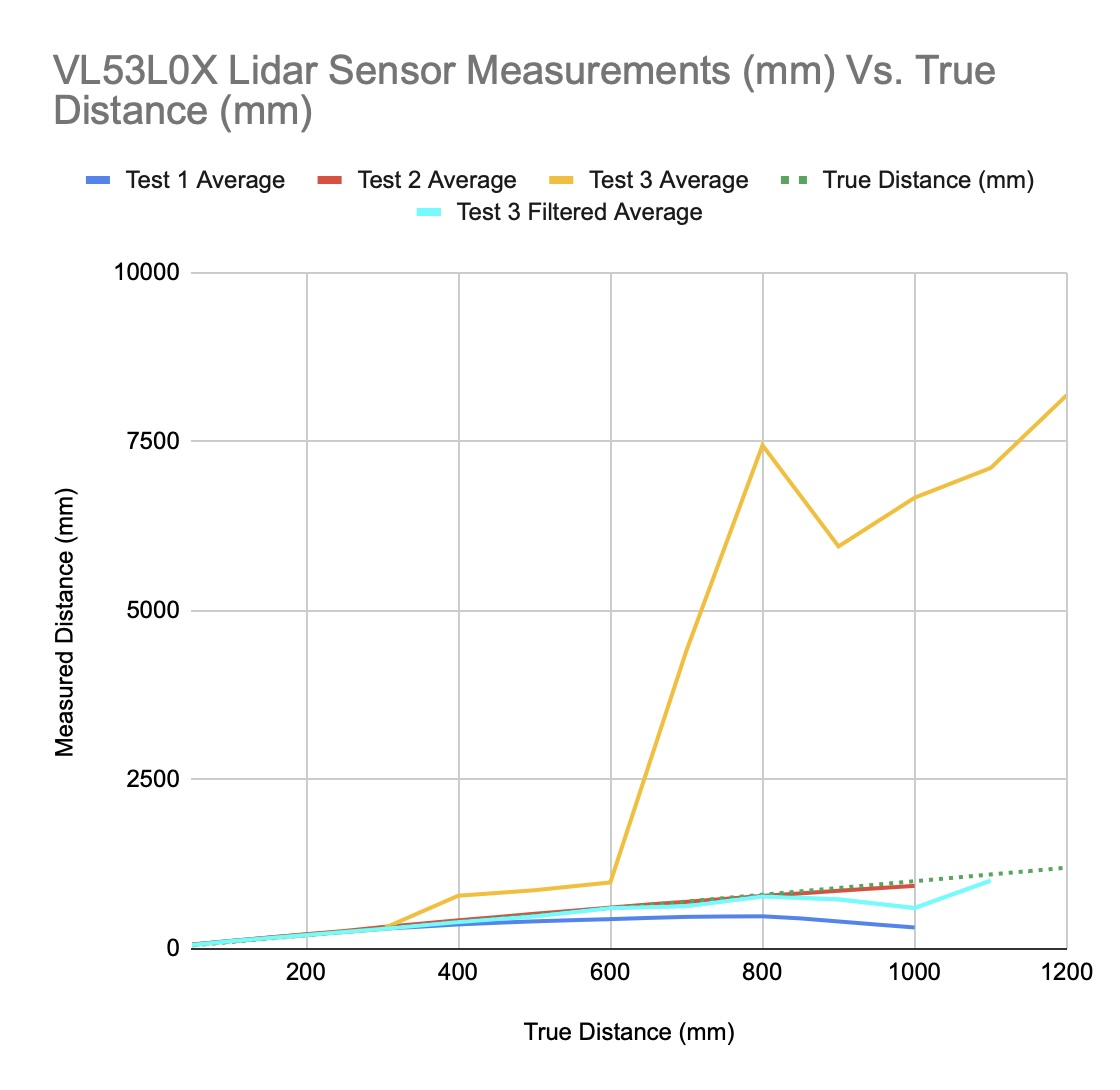
Figure 1: VL53L0X Lidar Sensor Measurements (mm) Vs. True Distance (mm). This graph shows the average distance measured at different set distances, with the different tests having different experimental setups. In addition to this, the dotted green line represents the optimal sensor outputs, given a perfect distance sensor.
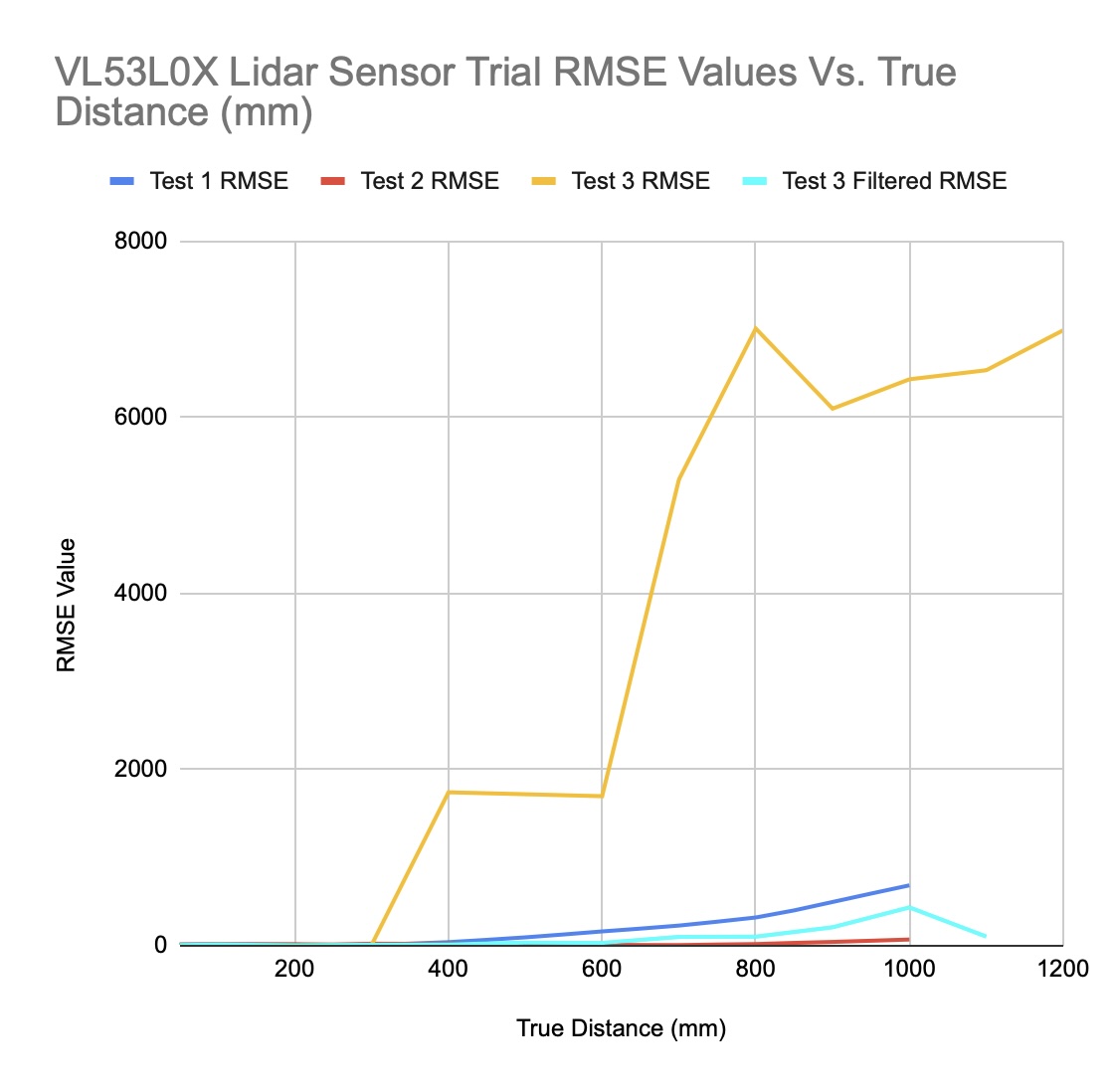
Figure 2: VL53L0X Lidar Sensor Trial RMSE Values Vs. True Distance (mm). This graph shows the RMSE values of each test shown in figure 1. A greater RMSE value indicates a greater level of error in the sensor measurements.
Analysis
Overall: This data shows that the outside conditions greatly affects the function of the sensor,
as the unfiltered test 3 data had a much higher average than that of all other testing. Additionally, it can be seen that,
while the measurements do increase with distance, there tends to be a large quantity of variation. In this data, RMSE is derived to represent the extent of the error in the data,
where a higher value demonstrates a measurement that is farther away from the true distance.
Test 1: This dataset demonstrates a decline in measured data with increased distance, and, with a maximum RMSE value of 684.635,
is the second-to-least accurate after the unfiltered test 3.
Test 2: As the most accurate dataset, this dataset has a maximum RMSE value of 69.296.
Test 3: With a multitude of maximum sensor values, this dataset is the least accurate, with a maximum RMSE value of 6990.45.
Filtered Test 3: Due to the defined maximum values of test 3, filtering out these maximums results in a dataset with a maximum RMSE of 433.9458,
although the final distance could not be included due to all values being equal to the maximum.
Discussion
In terms of the overall goal of constructing a pair of goggles, these results help to clarify how lidar sensors should be used in the design. With the VL53L0X acting as a small-scale model of a more powerful lidar sensor, the data demonstrates that measurements will typically correlate with the true distance, meaning that the sensor will not begin decreasing in value in response to higher distances. Additionally, the success of the filtration of test 3 suggests that lidar sensors have a maximum value which, if necessary, can be filtered out to prevent the extreme skew of data. For the design of the goggles, the outcomes of these trials point to spacing the lidar sensors evenly around the head, focusing stronger sensors at the back. This would make use of the greater ability of lidar sensors to detect closer objects, and would build in a filter to remove values matching the greatest possible value of the sensors.
References
Almalioglu, Y., Turan, M., Trigoni, N., et Markham, A. (2022). Deep learning-based robust positioning for all-weather autonomous driving. Nature Machine Intelligence, 4(9), 749–760. https://doi.org/10.1038/s42256-022-00520-5
Ekeland, A., Rødven, A., et Heir, S. (2019). Injuries among children and adults in alpine skiing and snowboarding. Journal of Science and Medicine in Sport, 22, S3–S6. https://doi.org/10.1016/j.jsams.2018.07.011
Howard, P. (2025, July 16). Pinout! The Raspberry Pi GPIO pinout guide. Raspberry Pi Pinout. https://pinout.xyz
Kuzuhara, K., Shibata, M., et Iguchi, J. (2021). Incidence of skiing and snowboarding injuries over six winter seasons (2012-2018) in Japan. Journal of Physical Education and Sport, 21(1), 73-80. https://doi.org/10.7752/jpes.2021.01010
Lisus, D., Laconte, J., Burnett, K., Zhang, Z., et Barfoot, T. D. (2025). Pointing the Way: Refining Radar-Lidar Localization Using Learned ICP Weights (No. arXiv:2309.08731). arXiv. https://arxiv.org/pdf/2309.08731
Satani, N., Patel, S., et Patel, S. (2020). AI Powered Glasses for Visually Impaired Person. International Journal of Recent Technology and Engineering (IJRTE), 9(2), 316–321. https://doi.org/10.35940/ijrte.B3565.079220
Stenroos, A., Handolin, L. (2014). Incidence of Recreational Alpine Skiing and Snowboarding Injuries: Six years experience in the largest ski resort in Finland. Scandinavian Journal of Surgery, 104(2), 127-131. https://doi.org/10.1177/1457496914532249
Sunfounder. (2025, April 2). Lesson 21: Time of Flight Micro-LIDAR Distance Sensor (VL53L0X). https://docs.sunfounder.com/projects/umsk/en/latest/05_raspberry_pi/pi_lesson21_vl53l0x.html
Wagner, M., Liebensteiner, M., Dammerer, D., Neugebauer, J., Nardelli, P., et Brunner, A. (2023). Incidence of alpine skiing and snowboarding injuries. Injury, 54(8), 110830. https://doi.org/10.1016/j.injury.2023.05.061
Yu, X., et Marinov, M. (2020). A Study on Recent Developments and Issues with Obstacle Detection Systems for Automated Vehicles. Sustainability, 12(8), 3281. https://doi.org/10.3390/su12083281
38-3D. (2025). How to Use the VL53L0X Time-of-Flight Distance Sensor with Arduino. https://38-3d.co.uk/blogs/blog/how-to-use-the-vl53l0x-time-of-flight-distance-sensor-with-arduino?srsltid=AfmBOoqMsfenj8Yzd2gF4pTzHLOkN2vdFis0sdaCWHVosAtBXUjTyrEF
February Fair Poster
Trouble accessing the document? Click here.