STEM II is taught by Dr. Crowthers and is the sequel to the independent research project completed in STEM I. For this project, teams work to build a device to serve a client in the community. The final device is presented at the Assistive Technology Fair in May. For my project, I am working as my team's CIO with Atharv (CEO), Arthur (CTO), and Isaac (CMO). The project involved major submissions at the different checkpoints throughout the engineering process, specifically the Preliminary Design Review (PDR), Cumulative Design Review (CDR), and Test Readiness Review (TRR).
Project Overview & Problem Statement
Low back pain affects roughly 80% of Americans and costs the U.S. economy around $60 billion annually (Simpson et al., 2019; Martin et al., 2014). Poor posture is a major contributing factor, as it increases mechanical stress on the thoracic and lumbar spine (Du et al., 2023). The problem is compounded by the fact that postural deviation often goes unnoticed, since it's so tied to individual habit.
Current solutions fall short in key ways. Existing wearables rely on a single fixed-threshold alert with no per-user calibration, and clinical-grade research devices remain out of reach for everyday consumers. What's needed is an affordable, comfortable, real-time monitor that delivers personalized haptic biofeedback.
Design Methodology
The methodology unfolded across four main phases.
Concept evaluation began with a Pugh chart analysis, scoring four sensor architectures and two attachment mechanisms against weighted criteria. The designs were benchmarked against existing products on the market: Upright GO 2, Straight Plus, and Z-Spine.
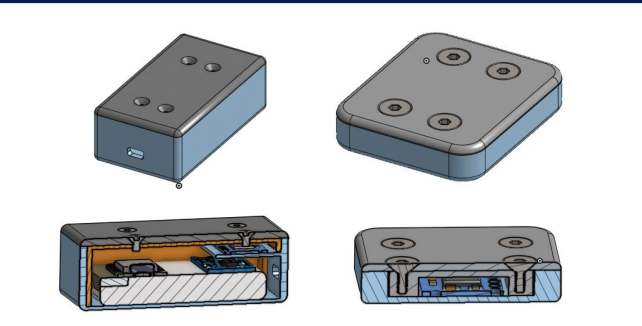
From there, the team moved into CAD and structural validation. The enclosure went through four iterations in Onshape, starting from a multi-piece, screw-joined design and landing on a single closed-encasement with an integrated adhesive slot and snap lock. Structural integrity was validated through ANSYS Mechanical FEA across different materials, a 20 lb load test, and a 1mm displacement test.
For the prototype, the hardware stack consists of an ESP32 microcontroller running MicroPython, an IMU, a vibration motor, a LiPo battery, and USB-C charging. Data is logged to a microSD card at one-second intervals. The firmware works by comparing live gravity-axis readings against a per-user baseline and triggering a haptic alert when deviation is sustained past a set threshold.
Finally, testing uses a per-user 50-second protocol: 10 seconds of baseline calibration, followed by 20 seconds of good posture, then 20 seconds of bad posture, all sampled at 10 Hz.
Prototype
Prototype Description
The final preliminary design was a developed form of Design 3 (1-IMU baseline), with a fully completed attachment mechanism to the user’s back, done through the use of medical adhesive pads. This connects the IMU to the user’s back directly, which reduces data collection sensitivity because readings are collected in close proximity to the spine itself.
The attachment mechanism was tested quantitatively using a 10-point Likert scale and scored on a per-client basis on comfort.
Additionally, each attachment mechanism was scored on longevity based on product specifications posted by the manufacturer. Data was collected by asking clients to score the comfort of each mechanism directly after application and removal, with mean client scores calculated for each attachment mechanism. These results are discussed more deeply in Design Study 3.
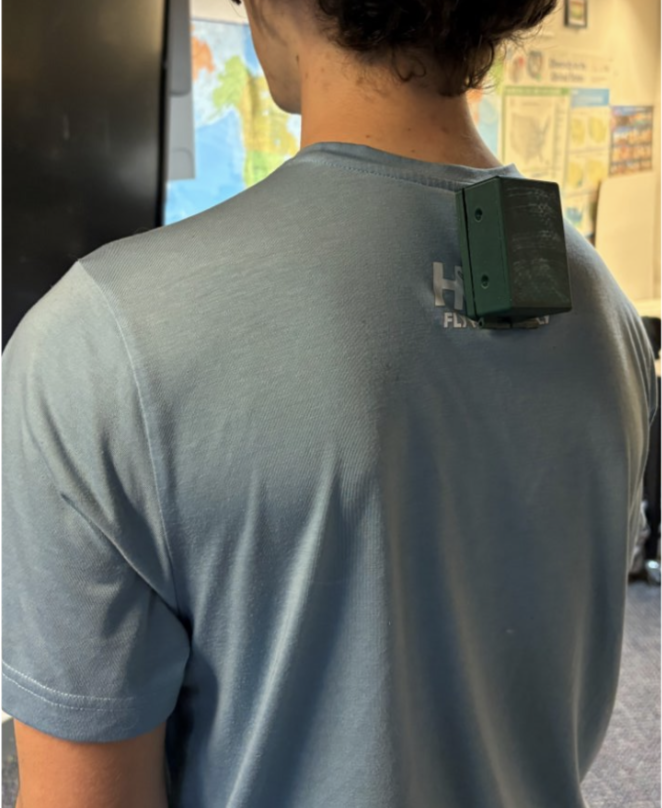
Our final prototype photo, with the design featured on Isaac.
Our CAD sketches for our first design.
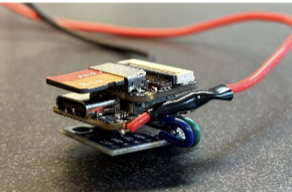
Our second iteration of our initial prototype.
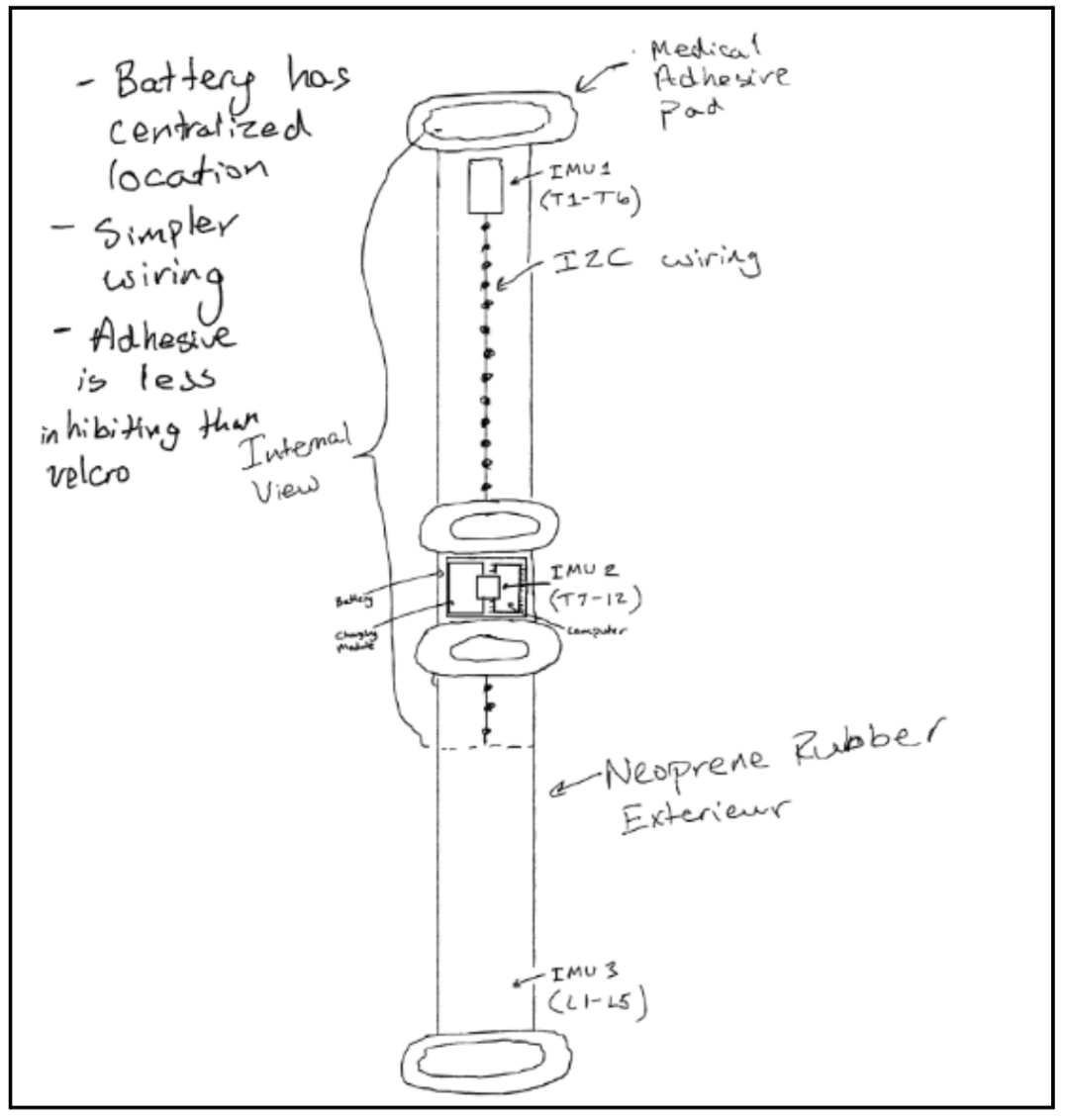
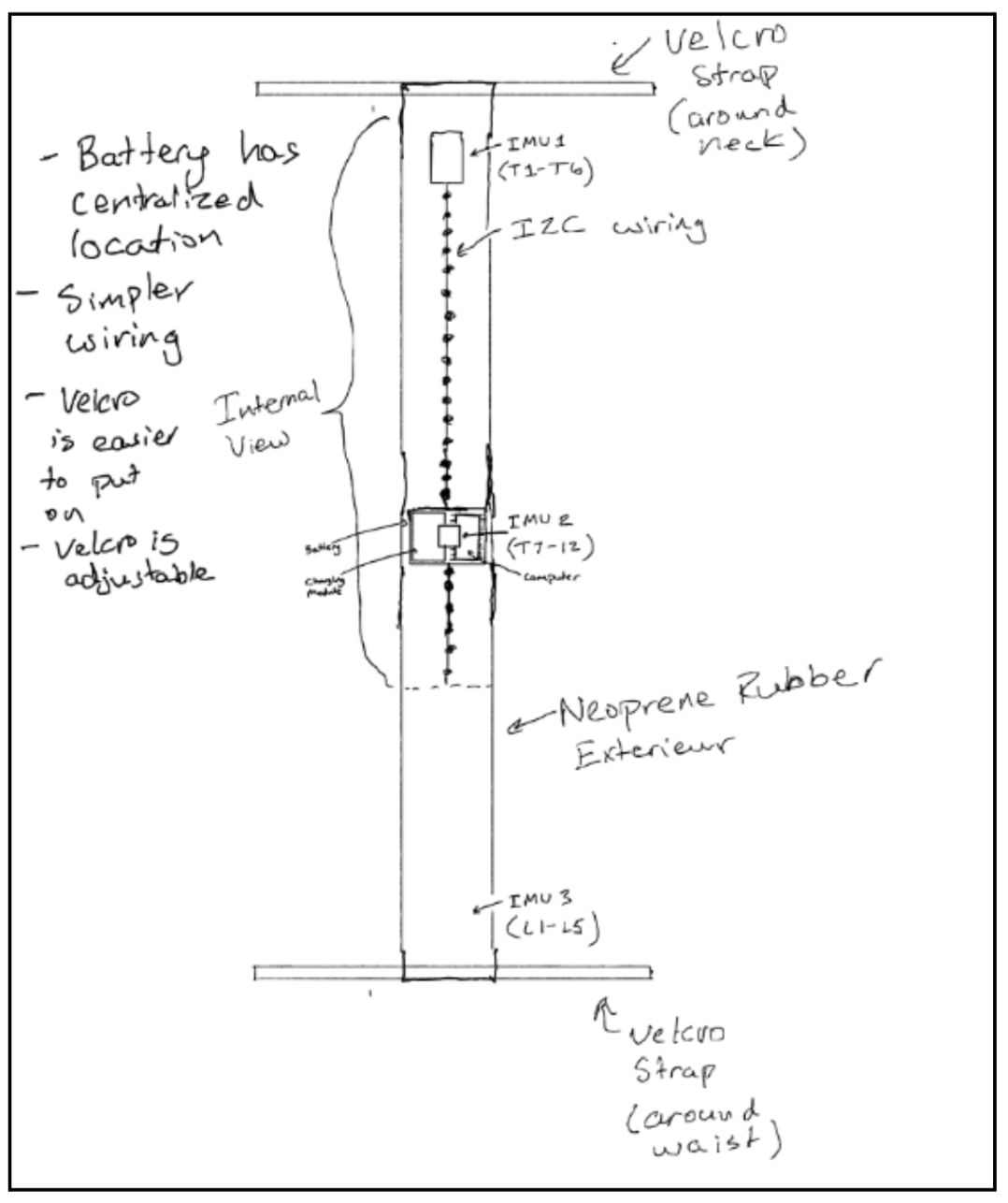
Our first design sketch submitted as part of our PDR.
Our second design sketch submitted as part of our PDR.
Poster Board
The poster board above summarizes the full arc of my STEM II project, from the problem statement and design approach through to my prototype and key findings.
If you're having trouble viewing the file in your browser, use this link: STEM II Poster Board.