Problem Statement
Design
Cerebral palsy (CP) is a group of disorders that affect movement and muscle tone due to damage or abnormal development in the brain's motor areas. Moderate to severe arm impairment from Cerebral palsy can make brushing one’s teeth challenging, and in some cases, impossible without external assistance. Many people with arm impairments require a personal care assistant (PCA) to help them with their everyday needs. This poses a significant threat to a person’s quality of life, jeopardizing both physical health and independence.
To determine our first design, we reached out to people from Easterseals. Easterseals is a national Affiliate network that provides essential services to children and adults with disabilities, older adults, veterans, and their families. After reaching a client, we interviewed them over Zoom to get a general understanding of their needs. From there, the idea of a hands-free toothbrush was born. First, we created various prototypes and tested them to see which prototype had the most efficient track run and would cover all sides of the teeth. We then used Onshape as our CAD software to model our prototypes. I did all the CAD work in my group. In Onshape, we used 3D-rendered teeth to give us somewhat accurate measurements for our final prototype. After many iterations and 3D prints, we ultimately landed with our final design. For our final design, we modeled and 3D printed a retainer-based toothbrush that uses moving brush heads to simulate traditional toothbrushing.
Prototype
CAD
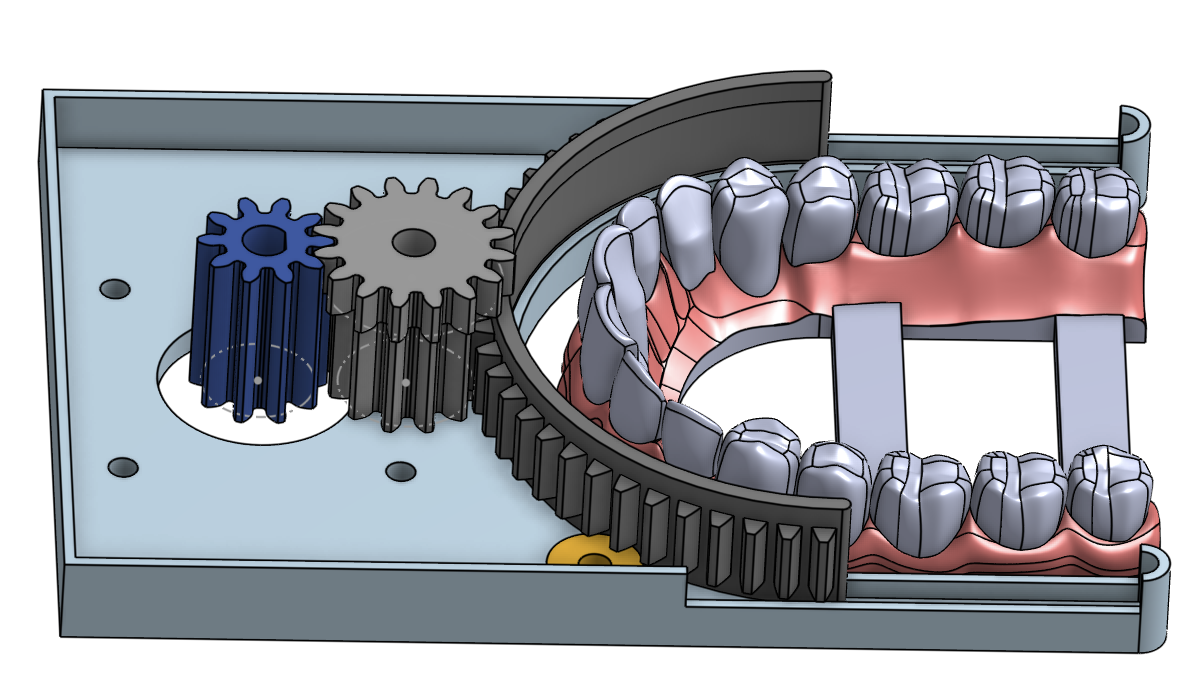
We kept the original retainer case from the initial prototype but removed the belts due to excessive friction. Our updated design eliminates the need for belts entirely, using a gear-driven system instead. A 10-tooth gear on the stepper motor drives a 16-tooth gear, which meshes with a 12-tooth gear, transferring motion to a partially cut, flexible 62-tooth TPU gear. This gear deforms slightly to fit inside the PLA retainer case, overcoming friction thanks to an 8.266x torque increase from the gear reduction.A 3-sided toothbrush is mounted on the smooth section of the TPU gear to clean all surfaces of the teeth. A circular spacer helps the TPU gear move smoothly, while a small PLA piece reinforces the structure. All non-motor gears spin on a dead axle.The stepper motor is powered by an 11.1V battery through a DRV8825 driver and controlled by an Arduino, which uses buttons to set direction and speed.Below is a scrollable CAD of the current, scaled-up prototype, showing the gear layout.