Jun 28th, 2017
![]() In response to the outbreak of highly infectious diseases, such as Ebola (2015) and Zika (2016), a Tele-Robotic Intelligent Nursing Assistant (TRINA) was developed by me and Dr. Hauser at Duke University to assist healthcare workers in routine patient-caring tasks, handling of contaminated materials and protective gear. This tele-nursing robot consists of a mobile manipulator robot, a human operator’s console, and software that supports various interfaces for direct teleoperation and task automation. It is also equipped with telepresence for bi-directional communication, and wireless sensors for collecting information from patient and environment. This tele-nursing robot is designed to be human-safe, versatile and usable by novice users.
In response to the outbreak of highly infectious diseases, such as Ebola (2015) and Zika (2016), a Tele-Robotic Intelligent Nursing Assistant (TRINA) was developed by me and Dr. Hauser at Duke University to assist healthcare workers in routine patient-caring tasks, handling of contaminated materials and protective gear. This tele-nursing robot consists of a mobile manipulator robot, a human operator’s console, and software that supports various interfaces for direct teleoperation and task automation. It is also equipped with telepresence for bi-directional communication, and wireless sensors for collecting information from patient and environment. This tele-nursing robot is designed to be human-safe, versatile and usable by novice users.
At WPI, our continuing research focuses on improving TRINA’s level of automation, adaptability, and usability. We aim to develop a shared-autonomous assistant robot for general-purpose tasks performed in hospital nursing, in-home care, warehouse logistics, social service, and manufacturing. Centered on TRINA platform, we conduct research on (1) shared autonomous motion coordination, (2) novel teleoperation interface, (3) human-robot collaboration.
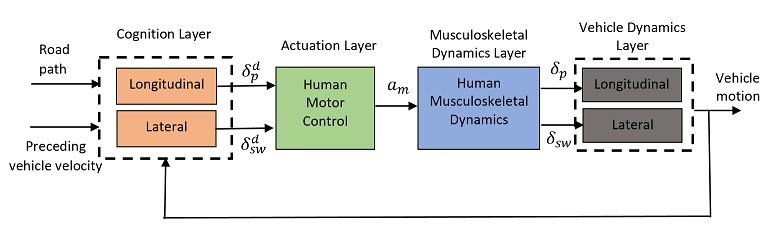 The development of vehicle and driver-assistance technology have motivated the high-fidelity modeling of humans for driving tasks. Such realistic simulations of passive and active driver behavior when maneuvering a vehicle not only enhances the understanding of driver’s limitation and preference in various driving scenarios but also contributes to the improvement of the usability and intelligence of the driver-assistance system, as well as the vehicle’s ergonomics and safety. This project focuses on rendering a driver’s passive and active motion in response to the dynamics of the vehicle under maneuver. The framework of our computational human driver model includes modules for (1) high-level decisoin making, (2) natural vechicle maneuver motion planning, (3) low-level motion and force control, and (4) vechicle dynamics simulation. The integration of the four modules aims at realistic and efficient simulation the dynamics of human driver and vechile in interactions. The muscle activitives extracted from the OpenSim-based human model faciltates the study of user comfort in various driving contexts.
The development of vehicle and driver-assistance technology have motivated the high-fidelity modeling of humans for driving tasks. Such realistic simulations of passive and active driver behavior when maneuvering a vehicle not only enhances the understanding of driver’s limitation and preference in various driving scenarios but also contributes to the improvement of the usability and intelligence of the driver-assistance system, as well as the vehicle’s ergonomics and safety. This project focuses on rendering a driver’s passive and active motion in response to the dynamics of the vehicle under maneuver. The framework of our computational human driver model includes modules for (1) high-level decisoin making, (2) natural vechicle maneuver motion planning, (3) low-level motion and force control, and (4) vechicle dynamics simulation. The integration of the four modules aims at realistic and efficient simulation the dynamics of human driver and vechile in interactions. The muscle activitives extracted from the OpenSim-based human model faciltates the study of user comfort in various driving contexts.
![]() This project focuses on the development of upper limb rehabilitation robots and therapies that can best adapt to the patients’ level of motor skills and promote stroke recovery. Folloing my previous research on bio-inspired methods for rendering natural human arm motion, this project further pursue low-level learning for generating dexterous manipulation motions that involve fine motor skills, and high-level motion learning for inferring human intent, preference, and task objectives.
This project focuses on the development of upper limb rehabilitation robots and therapies that can best adapt to the patients’ level of motor skills and promote stroke recovery. Folloing my previous research on bio-inspired methods for rendering natural human arm motion, this project further pursue low-level learning for generating dexterous manipulation motions that involve fine motor skills, and high-level motion learning for inferring human intent, preference, and task objectives.