Computational Human Modeling in Human-vehicle Interaction
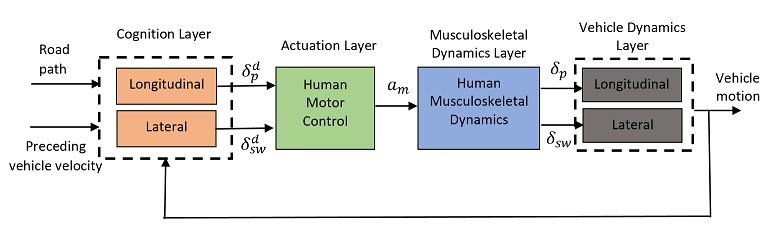 The development of vehicle and driver-assistance technology have motivated the high-fidelity modeling of humans for driving tasks. Such realistic simulations of passive and active driver behavior when maneuvering a vehicle not only enhances the understanding of driver’s limitation and preference in various driving scenarios but also contributes to the improvement of the usability and intelligence of the driver-assistance system, as well as the vehicle’s ergonomics and safety. This project focuses on rendering a driver’s passive and active motion in response to the dynamics of the vehicle under maneuver. The framework of our computational human driver model includes modules for (1) high-level decisoin making, (2) natural vechicle maneuver motion planning, (3) low-level motion and force control, and (4) vechicle dynamics simulation. The integration of the four modules aims at realistic and efficient simulation the dynamics of human driver and vechile in interactions. The muscle activitives extracted from the OpenSim-based human model faciltates the study of user comfort in various driving contexts.
The development of vehicle and driver-assistance technology have motivated the high-fidelity modeling of humans for driving tasks. Such realistic simulations of passive and active driver behavior when maneuvering a vehicle not only enhances the understanding of driver’s limitation and preference in various driving scenarios but also contributes to the improvement of the usability and intelligence of the driver-assistance system, as well as the vehicle’s ergonomics and safety. This project focuses on rendering a driver’s passive and active motion in response to the dynamics of the vehicle under maneuver. The framework of our computational human driver model includes modules for (1) high-level decisoin making, (2) natural vechicle maneuver motion planning, (3) low-level motion and force control, and (4) vechicle dynamics simulation. The integration of the four modules aims at realistic and efficient simulation the dynamics of human driver and vechile in interactions. The muscle activitives extracted from the OpenSim-based human model faciltates the study of user comfort in various driving contexts.