Abstract
Path planning is an NP-Hard problem used to solve for an optimal path between an initial and final
position. While considering the shortest distance, current path planning algorithms do not consider
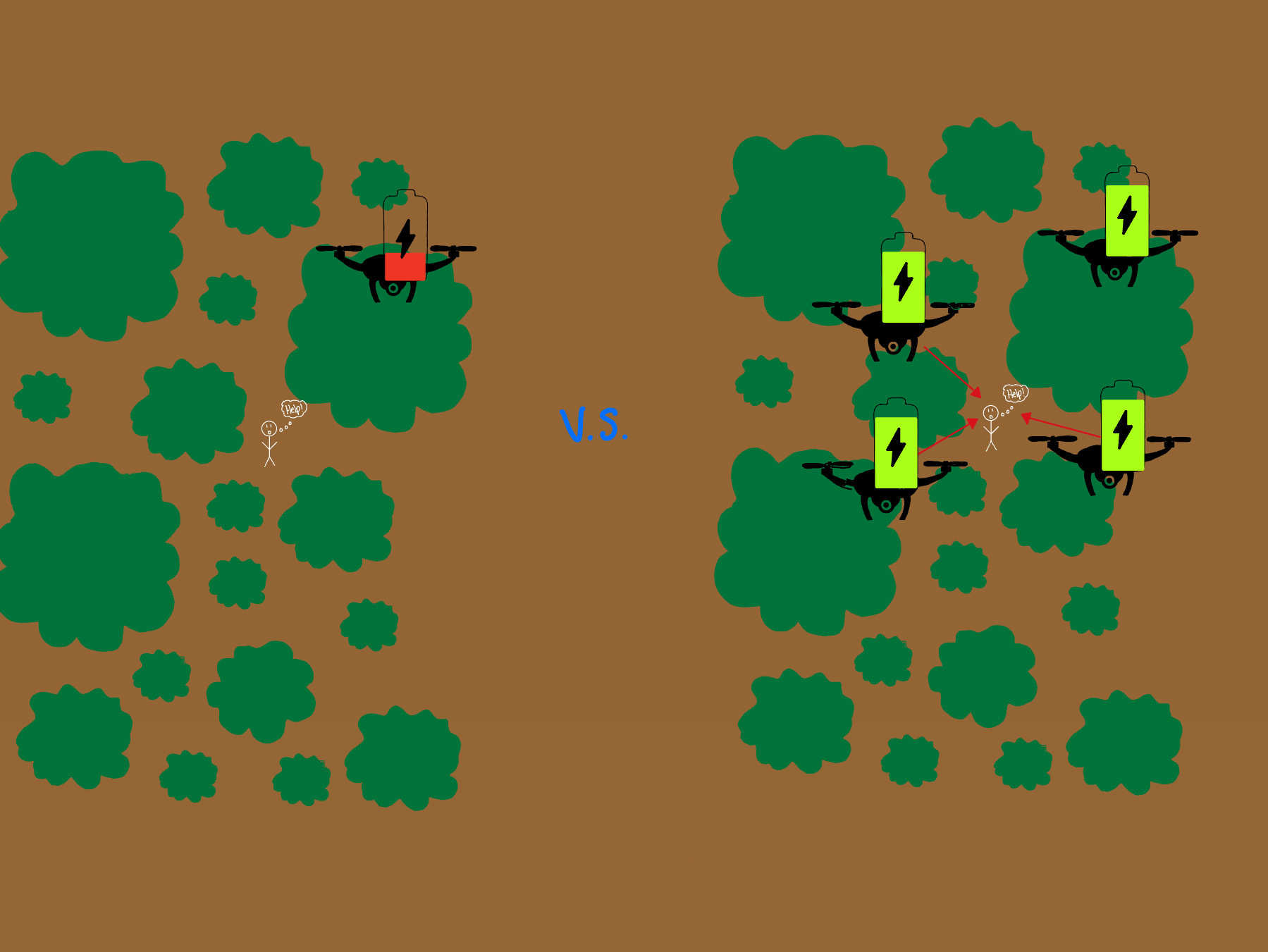
other factors such as energy efficiency, area coverage, or multiple drones necessary for efficient
search
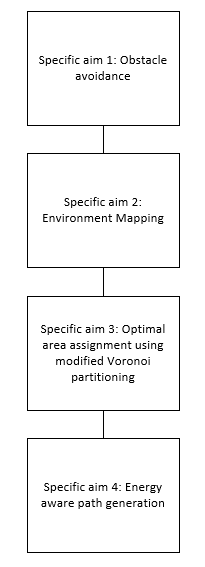
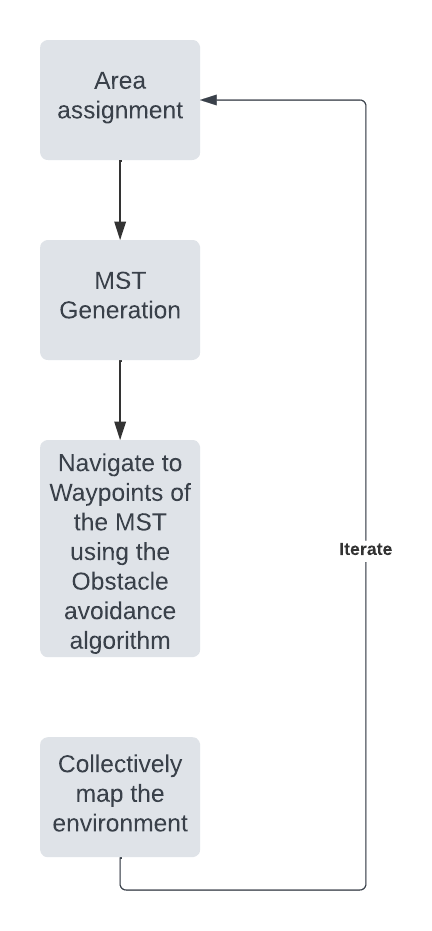
and rescue missions. A solution to this problem is proposed in this paper. A modified Voronoi
partitioning was utilized to divide the area to be searched to ensure equal division of the search area
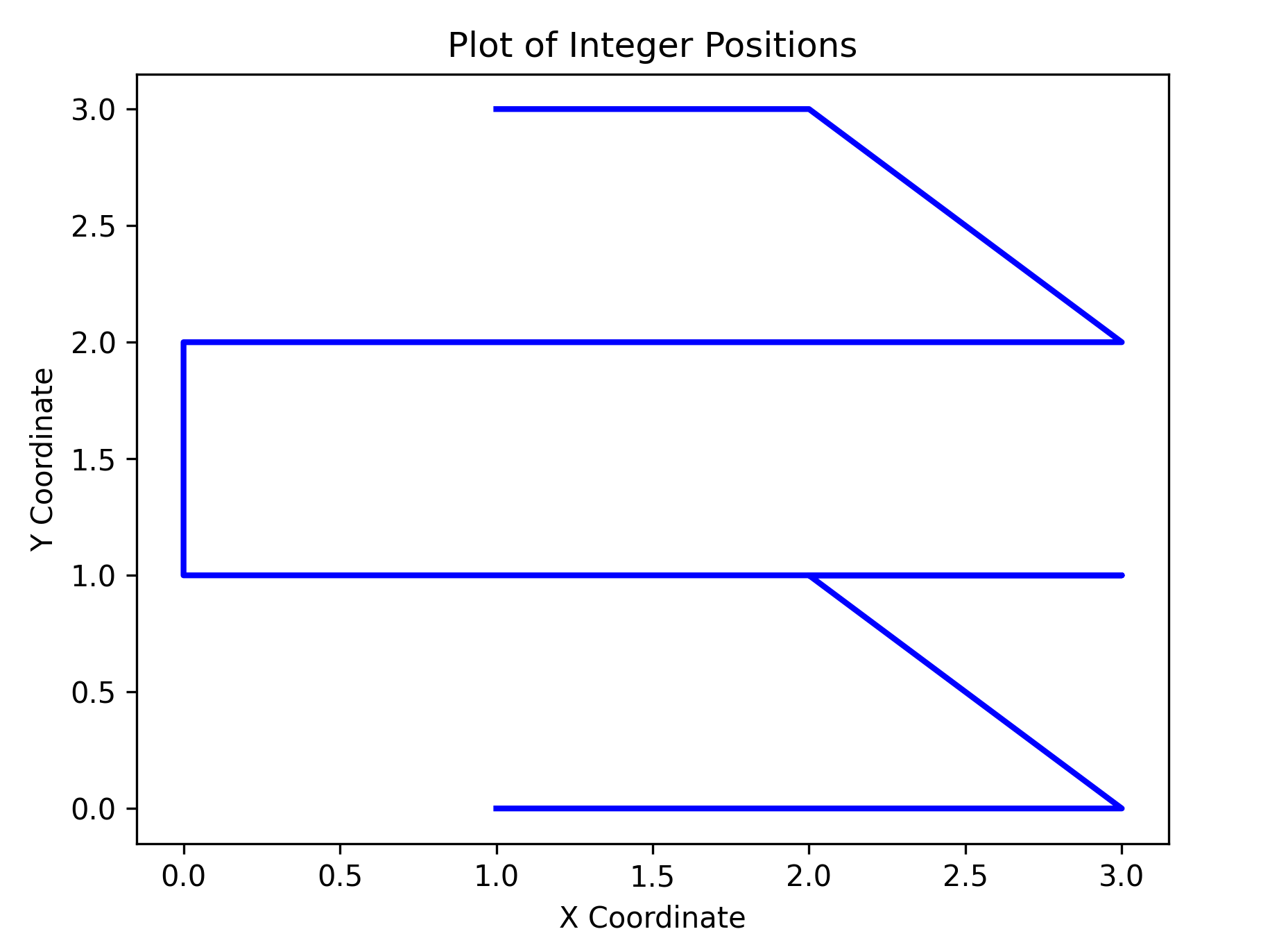
among the different drones. A minimum spanning tree was then constructed for each drone within the
partitioned area which was used as the shortest coverage path. To address the energy efficiency
problem, 90-degree turns and visiting already searched areas were avoided. After simulating this model
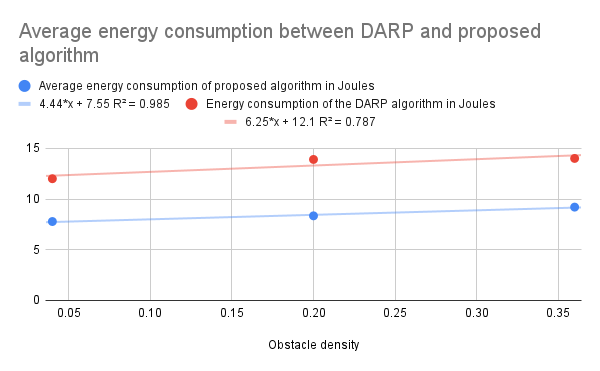
in V-REP and taking into account the energy consumption of a drone for a given path, the results yielded
that the proposed method had an equal energy consumption to the currently considered most efficient
search pattern. However, the coordination abilities of the proposed algorithm are advantageous. Using
this algorithm in a search and rescue mission will expedite the process.
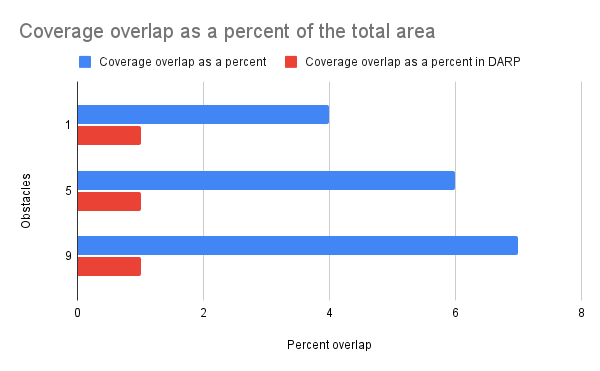
 A comparision of the percent error in the area assignment between the proposed algorithm and "DARP" by Kapoutsis et al. 2017.
A comparision of the percent error in the area assignment between the proposed algorithm and "DARP" by Kapoutsis et al. 2017.