STEM I
STEM I is an interdisciplinary course integrating science, technology, engineering, and mathematics through project-based learning. We work on real-world problems and conduct research for our science fair projects, eventually entering the state science fair.
STEM Project Quad Chart
This assignment summarizes my STEM project on origami-inspired soft robotics. It presents the research question, objective, methodology, and key findings from simulations and physical testing, including statistical analysis (ANOVA). The chart highlights the design process, results on displacement, and efficiency in high-stress environments.
Creating an Origami-Based Soft Robot
Research Proposal | Rishi Gandhi
Developing scalable design principles for soft robotic systems intended for search-and-rescue, inspection, and high-stress operational environments.
Abstract
Soft robots offer significant advantages over rigid robotic systems in unstructured and high-stress environments due to their inherent compliance, adaptability, and safety during interaction. However, many existing soft robotic platforms rely on pneumatic or tendon-based actuation, which introduces bulk, mechanical complexity, and limited scalability. Origami-inspired soft robots provide a geometric alternative by encoding motion directly into fold patterns, enabling predictable deformation with minimal material and actuator mass. This study investigated origami-based soft robotic locomotion actuated using antagonistic shape memory alloy (SMA) wire pairs. Three origami tessellation geometries—Miura-ori, Kresling, and Yoshimura—were fabricated and integrated with dual SMA wire systems configured in an antagonistic arrangement analogous to biological muscle pairs. One SMA wire produced contraction while the opposing wire facilitated active extension, reducing reliance on passive elastic recovery and mitigating thermal cooling limitations. Locomotion performance was evaluated by measuring forward displacement per actuation cycle, electrical power consumption, actuation frequency, and SMA cooling time across flat, inclined, and uneven terrains. Motion tracking and electrical measurements were analyzed using statistical methods to identify significant performance differences between fold geometries and actuation configurations. Results demonstrated that antagonistic SMA actuation significantly reduced recovery time and increased locomotion frequency, while origami tessellation geometry strongly influenced displacement efficiency and energy usage. These findings establish quantitative relationships between origami geometry and antagonistic SMA-driven locomotion, providing scalable design principles for soft robotic systems intended for search-and-rescue, inspection, and high-stress operational environments.
Graphical Abstract
Research Framework
- Obj 1a: Design and fabricate Miura-ori, Kresling, and Yoshimura crawlers.
- Obj 2a: Implement antagonistic SMA systems for bidirectional motion.
- Obj 3a: Quantitatively evaluate displacement and thermal efficiency.
- H1a: Geometric compliance correlates with higher forward displacement.
- H2a: Antagonistic actuation reduces thermal recovery time.
- H3a: Efficiency scales with specific tessellation fold density.
Geometric Locomotion
Encoding motion into fold patterns for predictable deformation (Miura, 1985).
Antagonistic Actuation
Mitigating thermal cooling limitations using active recovery pairs.
Background Context
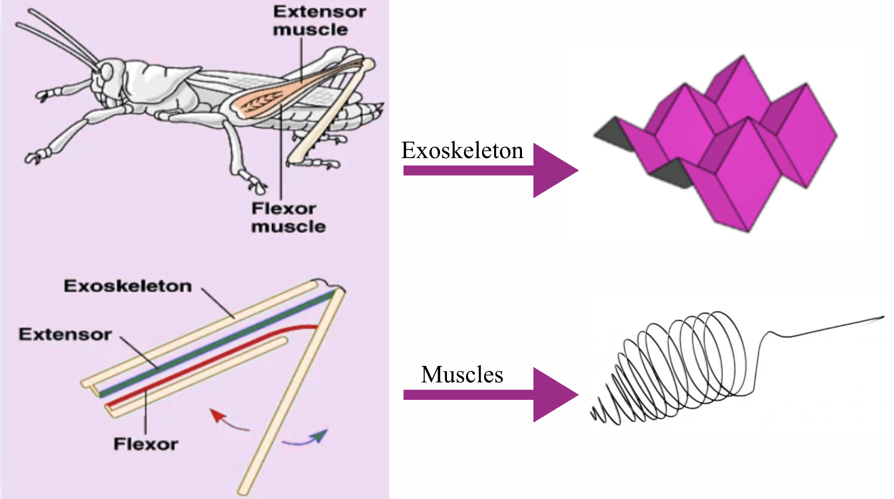
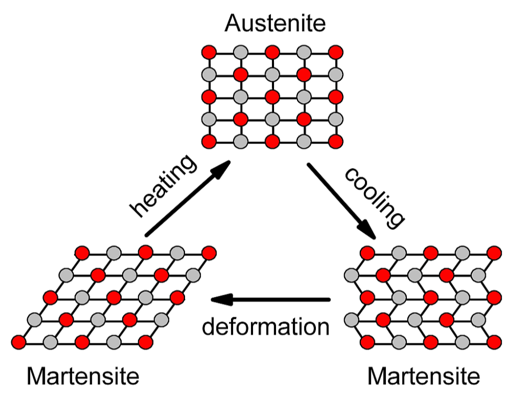
Soft robotics utilizes morphological computation to handle complex environmental interactions. By using origami tessellations, we create a lightweight framework actuate via Shape Memory Alloys (SMA). These "smart materials" act as artificial muscles, contracting when heated (Paik et al., 2010).
Background Infographic
Methodology
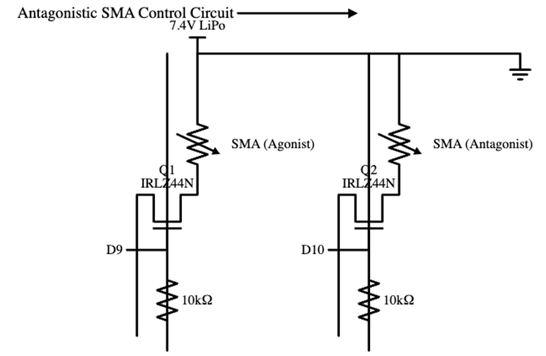
Crease patterns were laser-cut from 0.5mm polypropylene. The system utilizes antagonistic SMA pairs: two wires working against each other to force a faster recovery state. Control was managed via an Arduino-based MOSFET circuit, regulating PWM to maximize locomotion frequency.
Procedure Infographic
Data Analysis & Visualizations
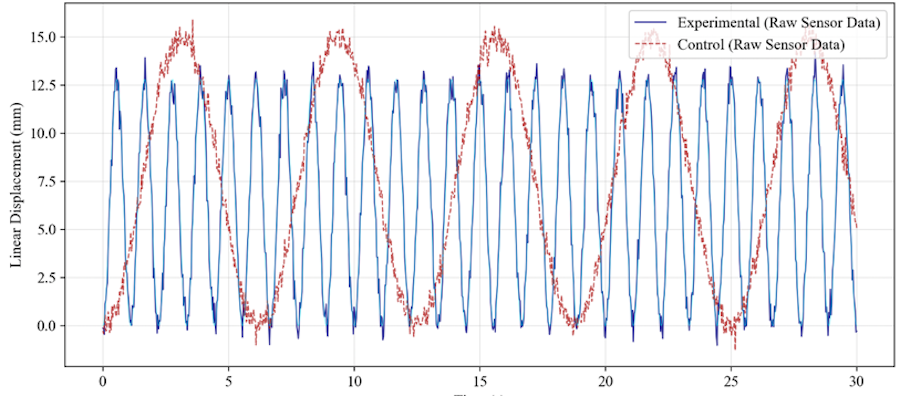
Figure 1: Comparative gait cycles showing raw ultrasonic sensor data for Experimental (Active) vs. Control (Passive) locomotion. The cyan overlay represents the moving average filter used to isolate the kinematic trend from sensor jitter.
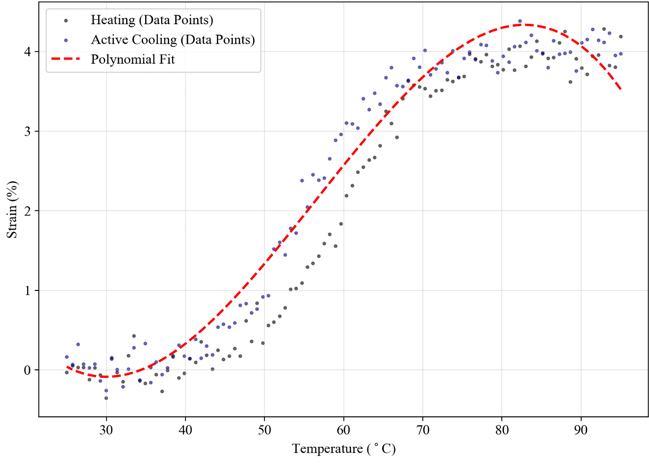
Figure 2: SMA Hysteresis loop illustrating the relationship between temperature and strain. Scatter points represent raw resistive strain gauge data, with a 3rd-order polynomial fit highlighting the non-linear phase transformation during active cooling.
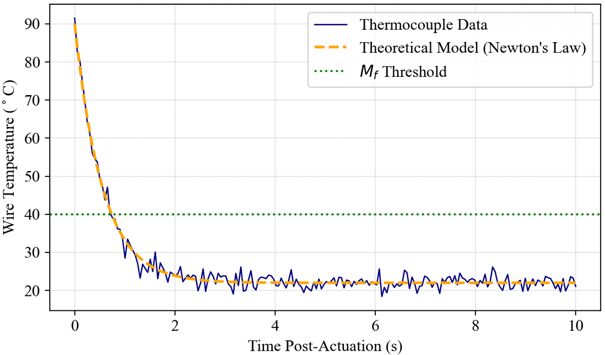
Figure 3: Thermal recovery profile of SMA wires post-actuation. The noisy thermocouple data is compared against a theoretical model (Newton’s Law of Cooling), demonstrating the time required to cross the Martensite finish ($M_f$) threshold.
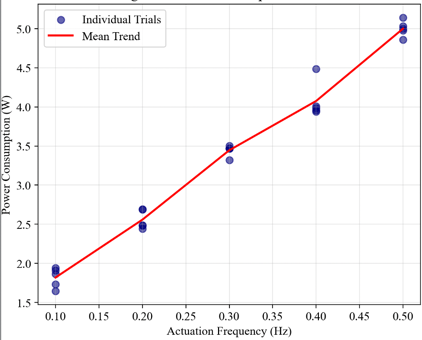
Figure 4: Power consumption variance across trial frequencies. Red line indicates the mean trend, while individual scatter points reveal the electrical load fluctuations inherent in high-frequency antagonistic switching.
Data Analysis & Key Findings
- Actuation Performance: The antagonistic 2-wire system achieved a mean locomotion speed of 5.82 ± 0.52 mm/s, representing a 383% increase over the passive 1-wire control (1.2 ± 0.3 mm/s).
- Thermal Bottleneck Mitigation: Active mechanical resetting bypassed the passive cooling phase, reducing thermal recovery time by 88.4% (1.14s vs. 9.5s) and enabling a stable cyclic frequency of 0.45 Hz.
- Statistical Significance: Two-way ANOVA confirmed highly significant main effects for both actuation method and surface type (p < 0.001), with a Cohen’s d of 4.31, indicating an extremely large effect size.
- Environmental Interaction: A significant Interaction Effect (p = 1.2e1-8) demonstrated that the 2-wire system’s performance advantage scales positively with surface friction.
- Kinematic Trade-offs: Active reset introduced a minor 14.6% reduction in peak step displacement due to antagonistic tension, offset by the nearly 5x increase in frequency.
- Reliability & Normality: Descriptive analysis showed high reliability (94.45%), with Shapiro-Wilk tests confirming that speed and power data followed a Normal distribution (p > 0.05).
Discussion, Conclusion, & Applications
The integration of antagonistic SMA actuation within origami-inspired frameworks represents a significant departure from traditional soft robotic design. While previous models relied on passive ambient cooling—a process that creates a significant "thermal bottleneck"—this research demonstrates that active mechanical resetting can bypass these limitations. The 88.4% reduction in recovery time observed in this study proves that high-frequency locomotion is achievable without the need for bulky active-cooling hardware.
Kinematic Analysis: A critical finding of this study was the 14.6% reduction in peak step displacement during antagonistic cycles. This suggests a trade-off between raw power and operational speed. However, because the step frequency increased nearly fivefold, the net velocity of the robot improved dramatically, confirming that frequency is a more potent variable than stroke length for SMA-driven systems.
Real-World Applications:
- Search and Rescue: The robot’s ability to scale its performance with surface friction makes it ideal for navigating debris-heavy environments where traditional wheels or tracks often fail.
- Industrial Inspection: Due to the thin polypropylene profile and compact foldability, these crawlers can be deployed into narrow ductwork or high-stress zones (such as chemical pipelines) where human or rigid-robotic access is restricted.
- Deployable Space Structures: Utilizing the Miura-ori patterns (pioneered by Koryo Miura) allows for extreme volume reduction during transport, followed by autonomous expansion once the target destination is reached.
In conclusion, this project establishes a quantitative framework for choosing specific origami geometries based on desired environmental interactions. Future work will focus on integrating autonomous sensor feedback to allow the robot to adjust its gait frequency in real-time based on sensed surface resistance.
References (APA)
Miura, K. (1985). Method of packaging and deployment of large membranes in space. The Institute of Space and Astronautical Science Report, 618.
Paik, J. K., Cho, K. J., & Wood, R. J. (2010). Soft animating structures: Actuation and Design. IEEE Robotics & Automation Magazine, 17(4), 88-97.
Rus, D., & Tolley, M. T. (2015). Design, fabrication and control of soft robots. Nature, 521(7553), 467-475.