Abstract
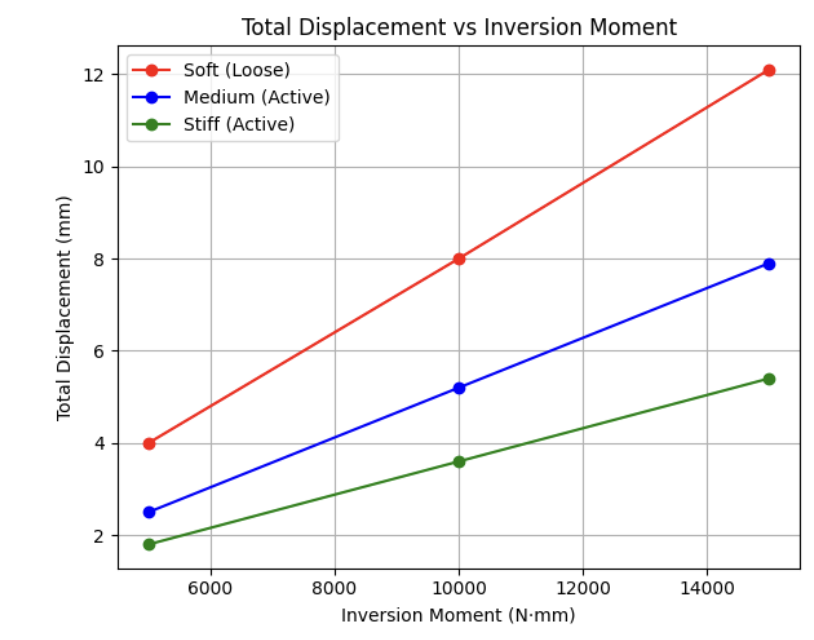
Ankle sprains are among the most common musculoskeletal injuries, particularly in athletic and physically active populations, and are frequently caused by excessive inversion and delayed joint stabilization. Traditional lace-up ankle braces provide passive support but do not adapt to changing loads or movement intensity, often limiting comfort and effectiveness. This study presents the design and evaluation of a pressure responsive adaptive ankle brace that dynamically adjusts tension in real time using force-sensing resistors (FSRs), a microcontroller, and motorized tightening mechanisms. The brace was developed and tested through bench and simulated trials using calibrated FSRs and controlled inversion scenarios. System performance was evaluated based on reaction time, pressure prediction accuracy, and biomechanical effectiveness. In mechanical simulations, increasing brace stiffness reduced peak inversion angle from 4.61 degrees in the soft condition to 2.06 degrees in the stiff condition under applied moments up to 15,000 Nmm. Overall, the adaptive brace demonstrated equal or improved stabilization performance compared to a traditional lace-up brace while providing responsive, activity-dependent support. These findings suggest that low-cost adaptive orthopedic devices can enhance ankle stability, reduce injury risk, and improve user compliance, with broader implications for future smart wearable rehabilitation technologies.