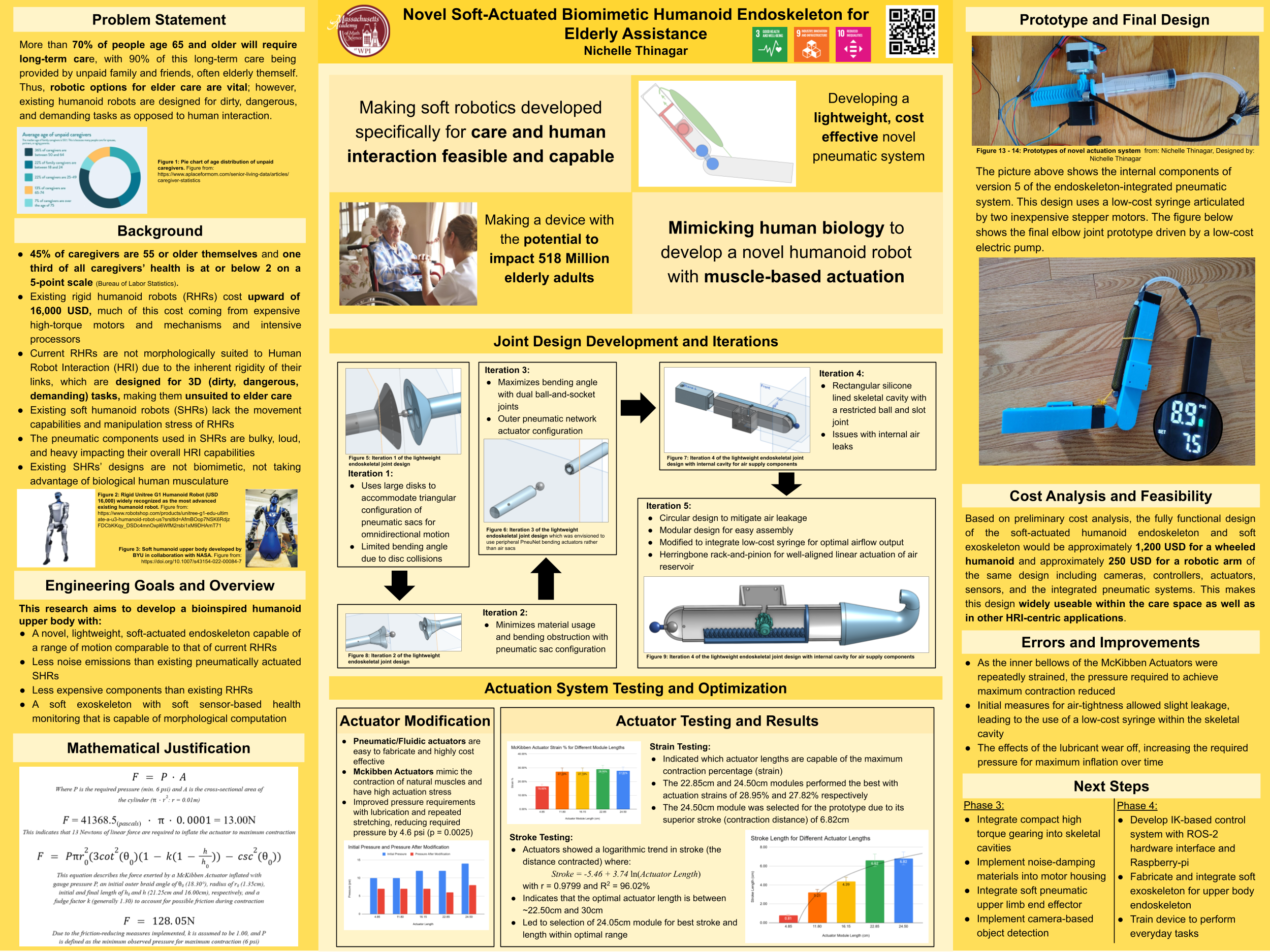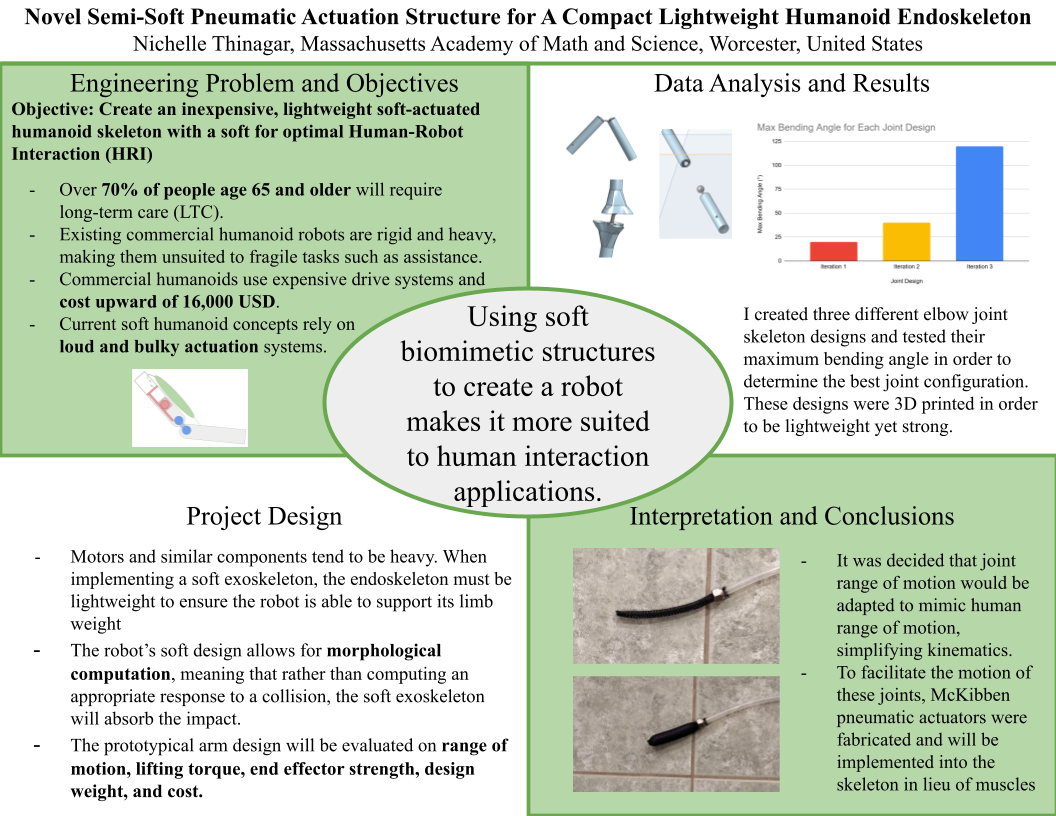
More than 70% of people age 65 and older will require long-term care, with 90% of this long-term care being provided by unpaid family and friends. 45% of these caregivers are 55 or older themselves, and one third of all caregivers’ health is at or below 2 on a 5-point scale. Thus, robotic options for elder care are vital, often coming in the form of humanoid robots. However, existing humanoid robots are designed for 3D (dirty, dangerous, and demanding) tasks as opposed to human-robot interaction (HRI), making them unsuitable for elder care. Existing rigid humanoid robots (RHRs) cost upward of 16,000 USD, much of this cost coming from expensive high-torque motors and mechanisms and intensive processors. Current RHRs are not morphologically suited to HRI due to the inherent rigidity of their links, which pose a significant injury risk upon collision in a care-oriented environment. Existing soft humanoid robots (SHRs), though, lack the movement capabilities and manipulation stress of RHRs. Furthermore, the pneumatic components used in SHRs are bulky, loud, and heavy, impacting their overall HRI capabilities. Additionally, existing SHR designs are not biomimetic, as they do not take advantage of biological human musculature. Therefore, this work set out to develop a novel, biomimetic, soft-actuated humanoid developed specifically for human interaction. This work focused specifically on the actuation of a lightweight endoskeleton using modified McKibben pneumatic actuators in conjunction with a novel skeleton-integrated low-noise air system. This system uses optimized McKibben actuators, which achieved a ~50% reduction in the pressure necessary for maximum strain after a repeated strain-based stretching and lubrication process. These actuators are able to exert a theoretical maximum linear force of 128.05 N, with a 13.00N force exerted to compress air into the actuator to the minimum observed pressure for maximum contraction of 6 psi. This facilitated the development of a biomimetic elbow joint, which was optimized for human-comparable movement, achieving a maximum bending angle of 180°. When integrated with a 21.25cm actuator module, this elbow joint was capable of lifting a 3.30lb load. This work represents a significant step towards enabling inexpensive soft robotic humanoid robots to assist elderly individuals, potentially impacting a group of over 581 million people and their caregivers.
More than 70% of people age 65 and older will require long-term care, with 90% of this long-term care being provided by unpaid family and friends, often elderly themself. Thus, robotic options for elder care are vital; however, existing humanoid robots are designed for dirty, dangerous, and demanding tasks as opposed to human interaction.
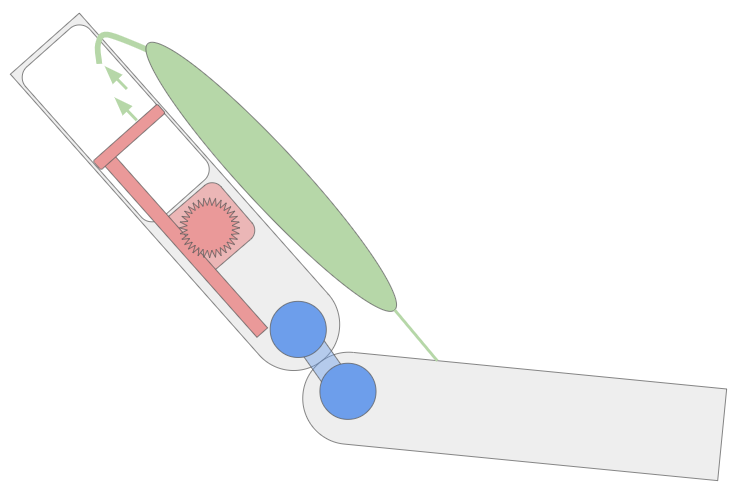
This research aims to develop a bioinspired humanoid upper body with a novel, lightweight, soft-actuated endoskeleton capable of a range of motion comparable to that of current RHRs , less noise emissions than existing pneumatically actuated SHRs , less expensive components than existing RHRs , and a soft exoskeleton with soft sensor-based health monitoring that is capable of morphological computation
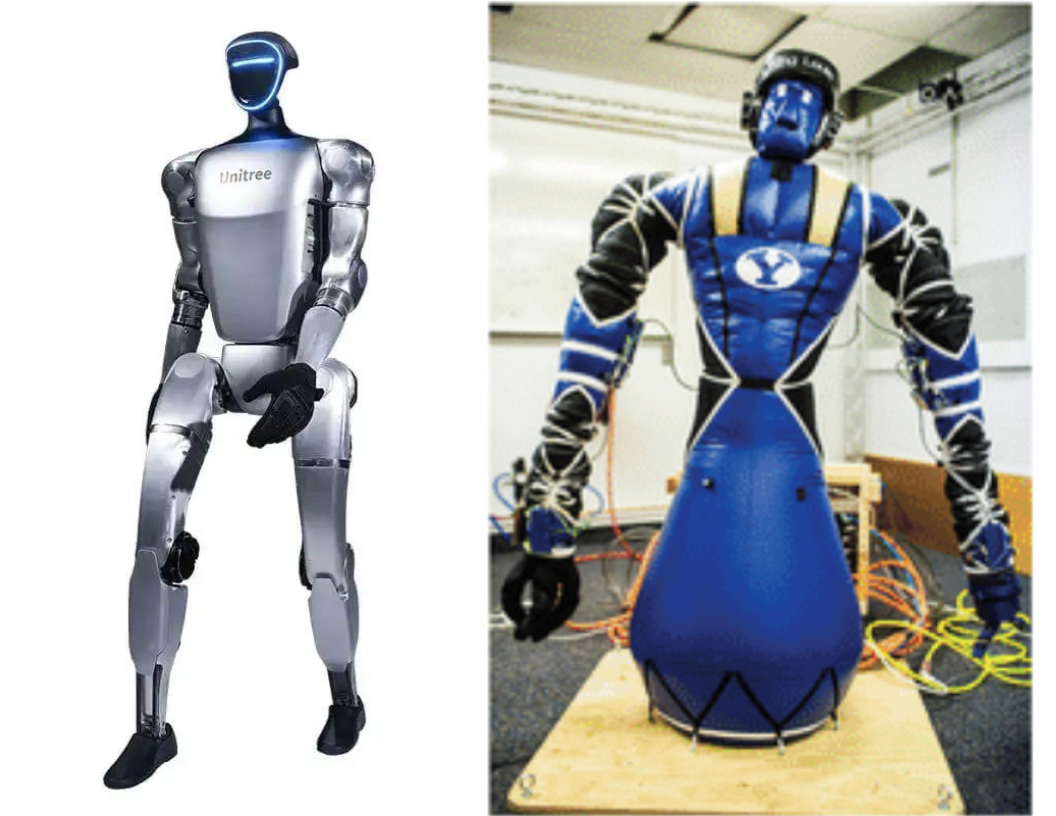
45% of caregivers are 55 or older themselves and one third of all caregivers’ health is at or below 2 on a 5-point scale (Bureau of Labor Statistics). Existing rigid humanoid robots (RHRs) cost upward of 16,000 USD, much of this cost coming from expensive high-torque motors and mechanisms and intensive processors Current RHRs are not morphologically suited to Human Robot Interaction (HRI) due to the inherent rigidity of their links, which are designed for 3D (dirty, dangerous, demanding) tasks, making them unsuited to elder care Existing soft humanoid robots (SHRs) lack the movement capabilities and manipulation stress of RHRs The pneumatic components used in SHRs are bulky, loud, and heavy impacting their overall HRI capabilities Existing SHRs’ designs are not biomimetic, not taking advantage of biological human musculature