STEM 1, taught by Dr. Crowthers, is a research-based course in which students complete an independent six-month investigation on a self-chosen topic of their interest. The class focuses on experimental design, research methods, and scientific writing, helping to guide the students through the process of each stage of research, from brainstorming to final presentation. Completed projects are submitted to science fairs at multiple levels, including school competitions, WRSEF (regional), MSEF (state), and ISEF (international). In this course, students learn to conduct rigorous research, evidence claims, develop clear scientific arguments, write in a formal scientific style, and present their work. Each student independently originates, conducts, and presents a research project originating from individual interest.
Aircraft wings often use small fins called vortex generators to prevent stall during takeoff and landing, but these devices remain deployed during cruise when they are not needed and create extra drag that wastes fuel. This project studied whether vortex generators could be made adjustable so they only deploy when necessary. A system with small motors and a lightweight machine-learning program was designed to choose the best fin height based on airflow conditions. Because real flight testing is expensive, many computer simulations were used to train the model and test the system in a realistic flight scenario. The results showed that the vortex generators stayed retracted for most of the flight and deployed only during critical phases, which improved aerodynamic efficiency and slightly reduced fuel use compared with fixed devices. This work suggests that making traditional safety devices adaptive could help aircraft operate more efficiently without reducing safety.
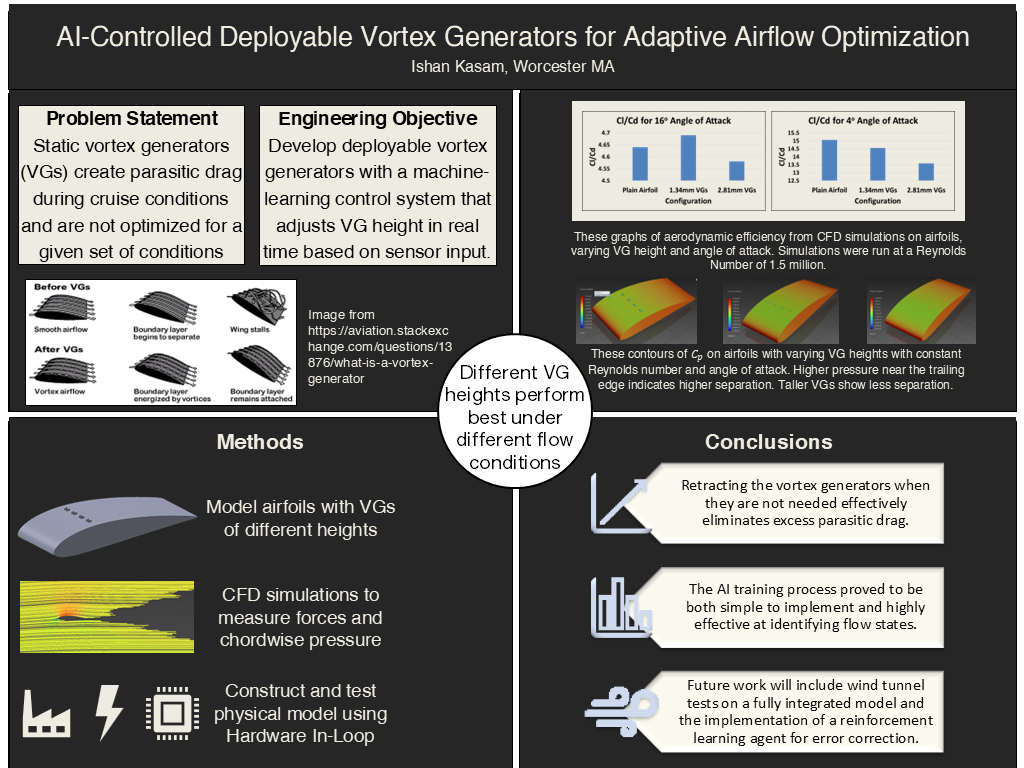
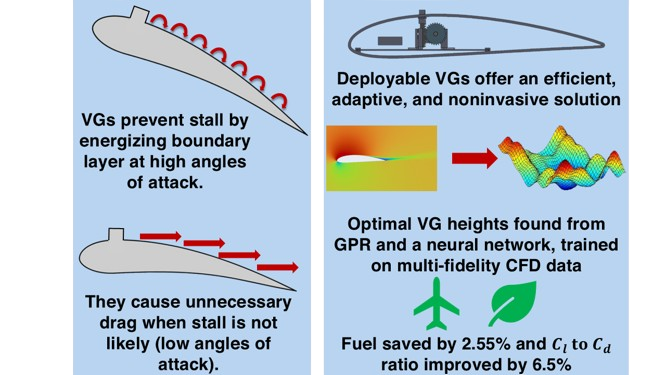
Parasitic drag from vortex generators (VGs) imposes persistent efficiency penalties during aircraft cruise, particularly for UAVs and small aircraft where fixed flow control devices operate outside their useful envelope for most missions. While VGs effectively delay boundary layer separation, their fixed height and permanent deployment cause unnecessary drag outside critical maneuvers and high-angle-of-attack situations. Current research gaps include non-optimized operational VG heights and deployable systems lacking truly adaptive control. This work designed and evaluated a deployable VG system capable of actively minimizing drag while preserving separation control when needed. A mechanically actuated VG array was developed using servo actuators and a lightweight machine learning algorithm for microcontroller implementation. The controller combines Gaussian Process regression with a neural network to capture uncertainty in separation onset and nonlinear aerodynamic response. Training data were generated through a multi-fidelity approach, pairing medium-fidelity RANS simulations with high-fidelity URANS simulations via Co-Kriging. Without fully integrated wind tunnel testing, system performance was assessed using a highly realistic flight simulation. Results show adaptive height control improved average lift-to-drag ratio (Cl/Cd) by 6.5% and saved 2.55% fuel compared to standard fixed VG airfoils. These findings demonstrate that VG height optimization, beyond simple deployment or retraction, is critical for reducing parasitic drag. The system is directly applicable to UAVs and light aircraft operating at moderate Reynolds numbers, where adaptive flow control can yield measurable efficiency gains without compromising stability.
Here is my project documentation, including my thesis, grant document, project proposal, and project logbook. View Documentation →
Aircraft fuel consumption accounts for approximately 2.5% of global CO2 emissions (Ritchie, 2024), with aerodynamic drag being a primary contributor.
Vortex generators are useful because they energize the boundary layer, helping to prevent airfoil stall at low speeds and high angles of attack during critical maneuvers. By introducing controlled vortices into the airflow, these devices delay flow separation and maintain lift when it is needed most.
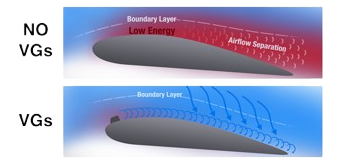
Visualization of the effects of vortex generators on airflow on an airfoil, adapted from Udris (2015).
Prior deployable VG systems achieved sub-millimeter actuation (Le Pape et al., 2012) and low-power deployment (Mamman et al., 2023) but relied on primitive control or highly intrusive hardware.
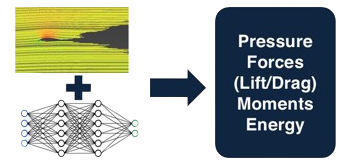
Infographic representing a possible way to use machine learning to gain insight into fluid mechanics.
ML models trained on 158 RANS simulations predicted flow fields ~10,000× faster than CFD with 0.827% error (Portal-Porras et al., 2022). Zhang et al. (2025) reconstructed full pressure fields from 10 sensors with 2.43% error using Gaussian Process Regression.
Static vortex generators create parasitic drag during cruise conditions and are not optimized for all given sets of conditions.
Develop deployable VGs with a machine learning control system that adjusts height in real time based on sensor input.
The aerodynamic training data was generated using Reynolds-Averaged Navier-Stokes (RANS) simulations of a NACA 4415 airfoil with deployable rectangular vortex generators scaled from Reuss et al. (1995) device dimensions. A total of 154 medium-fidelity simulations were executed across 22 combinations of Reynolds numbers (0.8×10⁶ to 2.0×10⁶) and angles of attack (0° to 20°) selected using Latin Hypercube sampling, with seven vortex generator heights ranging from 0 to 3 mm. The computational domain employed a C-shaped topology with inlet positioned 1.25 m upstream, outlet 5 m downstream, and far-field boundaries 2.5 m above and below the chord line. Targeted mesh refinement was applied using two nested bounding boxes: a fine box extending 0.1c upstream and 0.5c downstream to capture vortex-induced shear layers, and a larger box extending to 9c downstream to resolve wake development. Meshes were generated using poly-hexcore topology with 28 inflation layers and first layer height of 1.5×10⁻⁶ m to achieve y⁺ < 1, resulting in approximately 1.84 million cells for vortex generator configurations. The k-ω SST turbulence model was selected with simulations converged to residual criteria of 10⁻⁵ and 0.1% turbulence intensity at boundaries. Validation was performed against experimental wind tunnel data from Reuss et al. (1995) for the 2.71 mm configuration at 12°, 18°, and 20° angles of attack. Ten high-fidelity Unsteady RANS (URANS) simulations with refined meshes (~10.3 million cells) were conducted using time steps of 0.0004s over 2000 iterations to provide correction data for multi-fidelity learning.
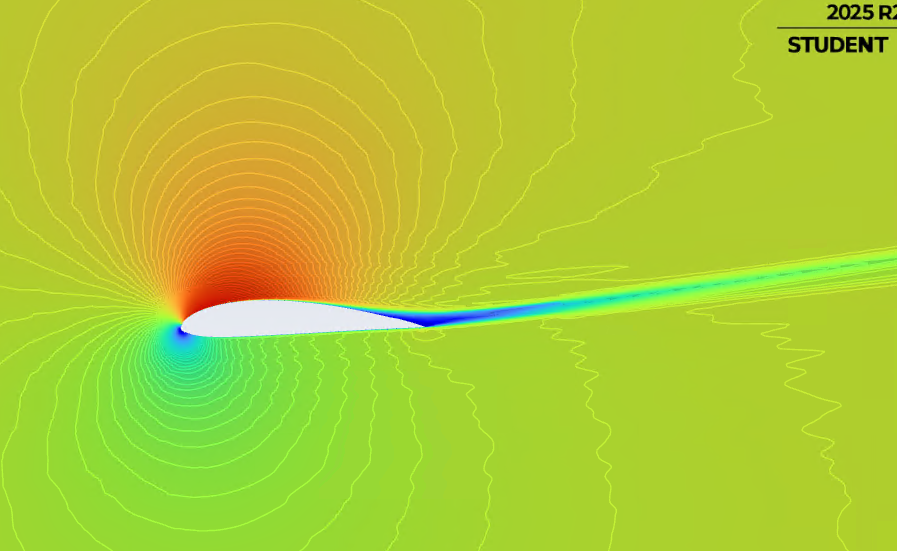
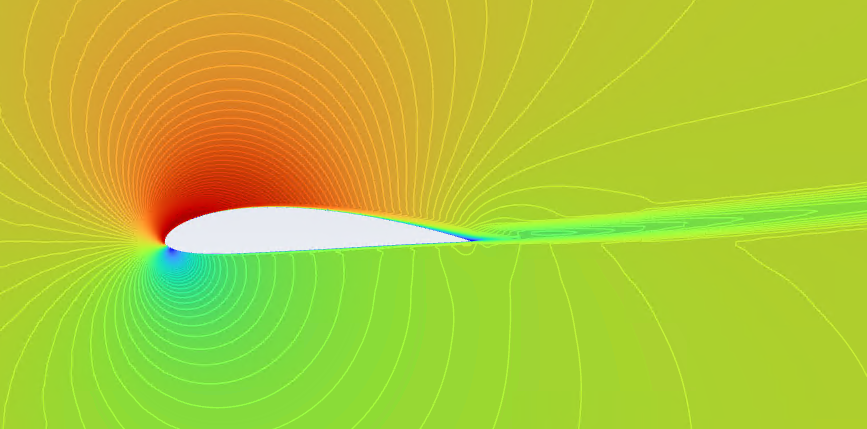
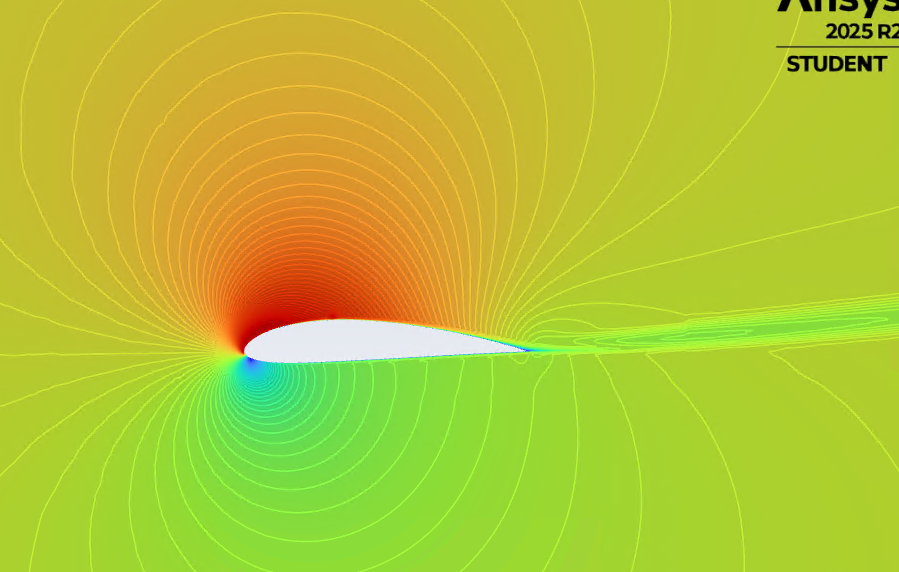
URANS simulations of plain airfoil at Reynolds number of 1×10⁶ and angle of attack of 18°, showing different degrees of negative velocity in the wake. The plain airfoil shows significant flow separation and lower lift under stall-likely conditions, while airfoils with VGs exhibit almost no negative velocity in the wake.
Two independent Gaussian Process Regression (GPR) models were trained to predict lift coefficient (C_L) and drag coefficient (C_D) from angle of attack, Reynolds number, and vortex generator height. Input features were preprocessed using z-score normalization after rescaling Reynolds number into units of millions to ensure Euclidean distance in feature space represented comparable physical variation across all parameters. The models employed a Matérn kernel with smoothness parameter ν = 1.5 to capture smooth aerodynamic responses while preserving sensitivity near stall and separation onset. Hyperparameters were optimized using multiple restarts, and ridge-type regularization was introduced to stabilize matrix inversion. A multi-fidelity residual learning framework was implemented where a secondary GPR model was trained on the residual between URANS and RANS simulations, with a spatial gating rule applying the correction only near high-fidelity training points. The control algorithm embedded these surrogate models to evaluate candidate vortex generator heights across the actuator range at each flight state, selecting configurations that maximized lift-to-drag ratio while enforcing constraints on minimum required lift and adequate stall margin.
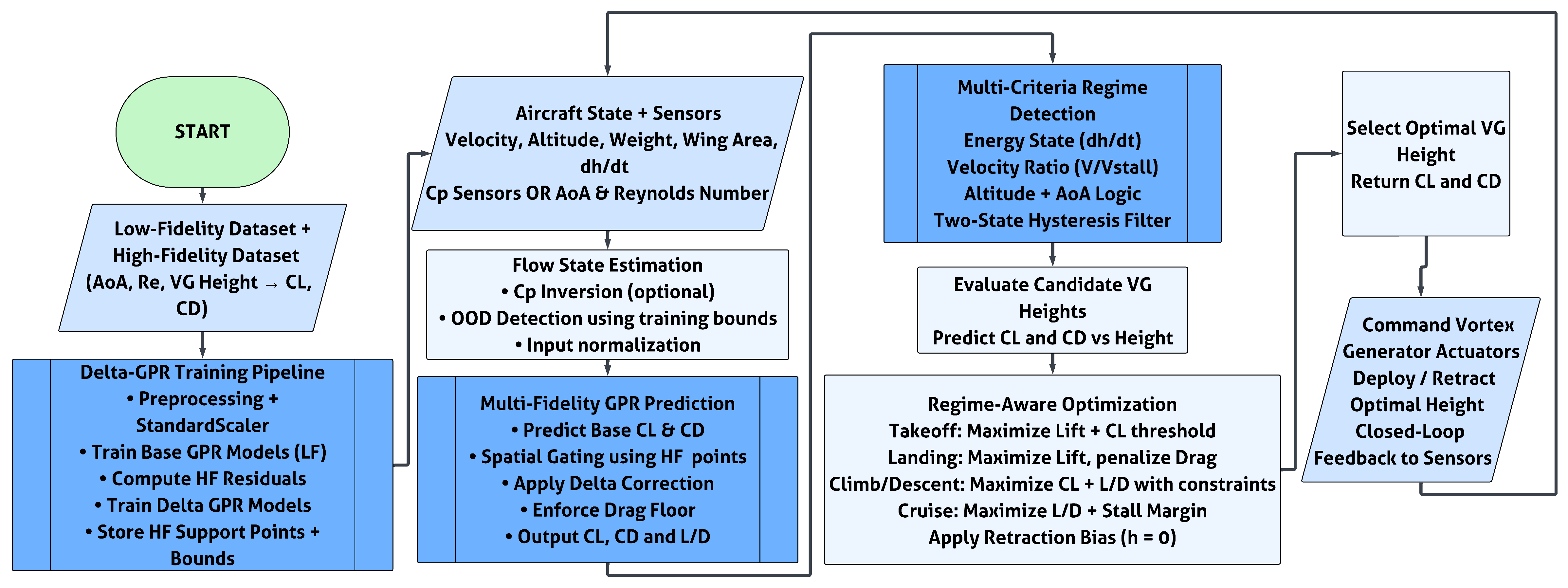
Trained a lightweight hybrid model that uses a delta-trained Gaussian Process Regression to predict aerodynamic performance, developed a regime-aware control algorithm that evaluates candidate configurations and computes the optimal vortex generator height, and validated against unseen cases. The model and its logic are outlined in the flowchart.
Mission-level performance was assessed using a physics-based flight simulator that discretized a complete takeoff-cruise-landing profile into 629 time steps with variable temporal resolution. At each time step, atmospheric properties were calculated based on altitude to determine Reynolds number and dynamic pressure, which fed into the GPR models to predict aerodynamic coefficients. The control algorithm evaluated all candidate vortex generator heights and selected the configuration that maximized aerodynamic efficiency while satisfying lift requirements. Predicted aerodynamic coefficients were converted to dimensional forces using dynamic pressure and wing area, then transformed to required propulsive power based on drag and velocity. Fuel consumption rate was calculated using propulsion efficiency and brake-specific fuel consumption parameters. Aircraft weight was updated at each time step using forward Euler integration as fuel mass decreased. Three configurations were simulated under identical mission conditions: clean airfoil, fixed-height vortex generators at seven different heights, and the adaptive deployable system. A constant drag penalty was applied to deployable configurations to represent actuator and mechanism drag not captured in CFD.
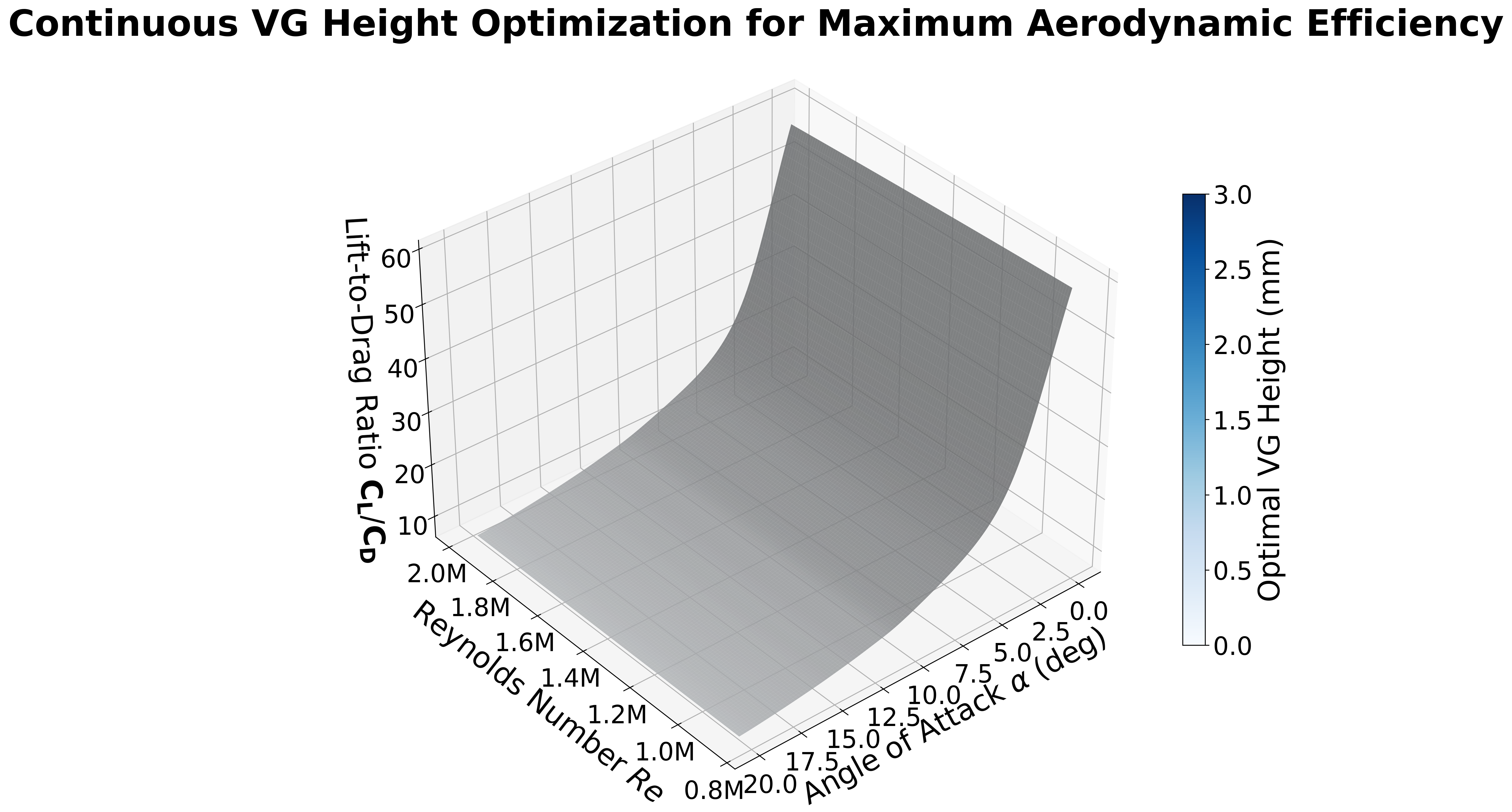
Aerodynamic efficiency (C_L/C_D) response surface with respect to angle of attack (α) and vortex generator height (h_VG). Analysis of variance (ANOVA) decomposition reveals that α contributes 94.6% of total variance, while h_VG contributes 4.2%. The interaction term accounts for 1.2%, with negligible higher-order effects. Maximum efficiency occurs at moderate angles of attack with optimally deployed vortex generators.
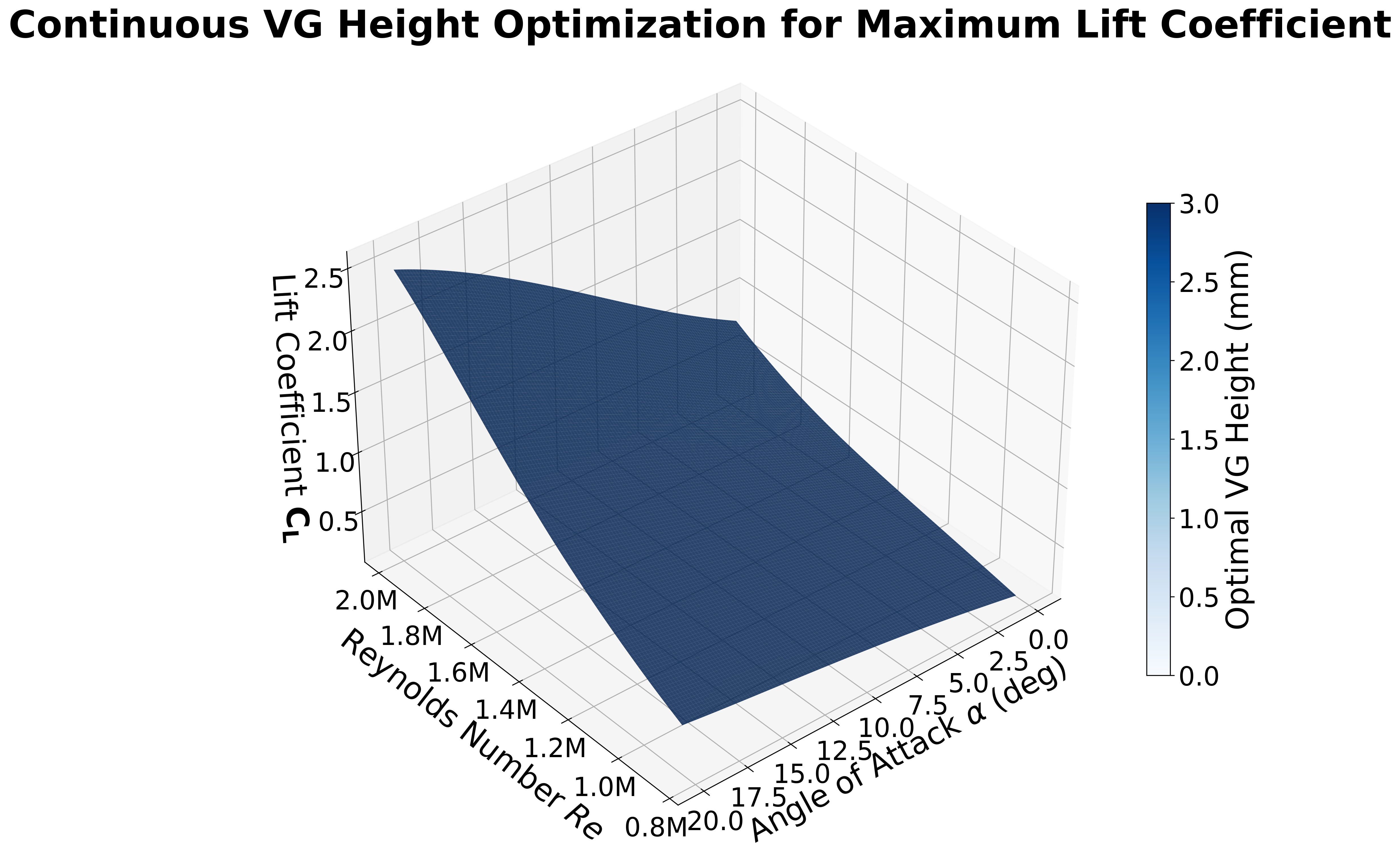
Maximum lift (C_L,max) response surface as a function of angle of attack and vortex generator height. ANOVA quantifies that α dominates the variance structure with 98.9% contribution, with h_VG contributing 0.7% and interaction terms 0.4%. The surface demonstrates that maximum lift increases monotonically with angle of attack and reaches peak enhancement with moderately deployed vortex generators, which delay flow separation and increase stall angle.
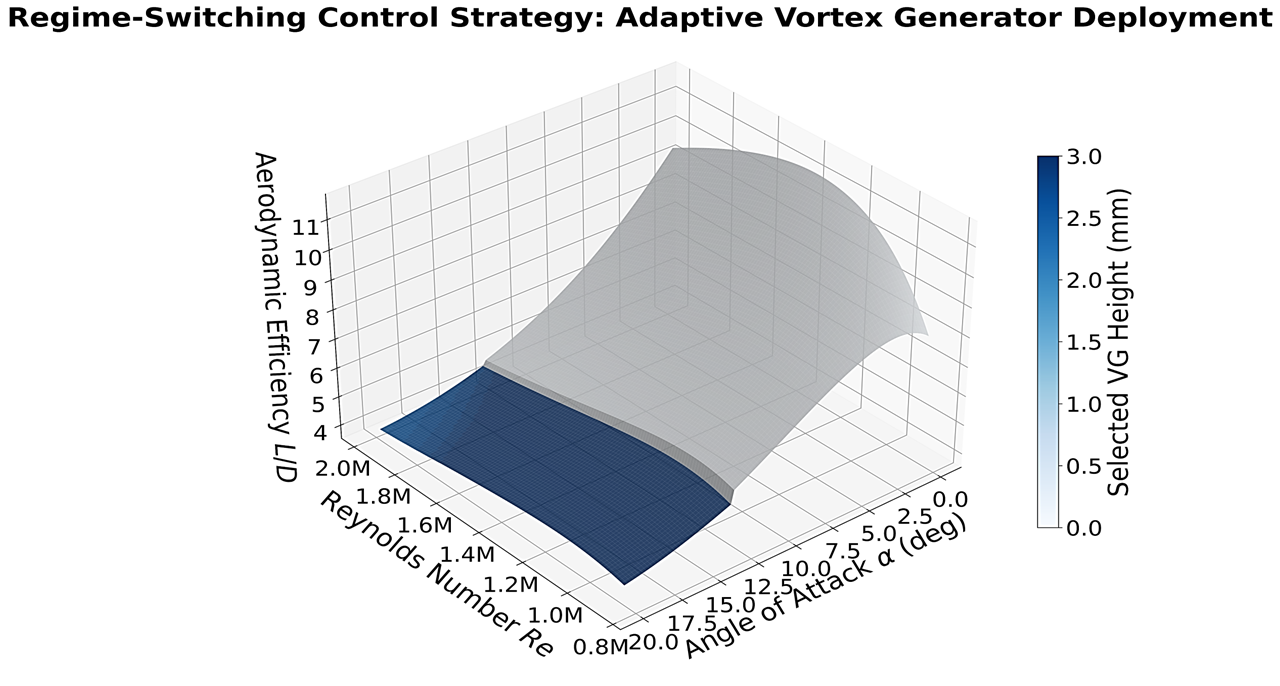
Predicted vortex-generator deployment map across the operational envelope. The control algorithm's decision logic is governed by the trade-off between enhanced lift-to-drag ratio and parasitic drag introduced by deployed vortex generators. At low angles of attack where the airfoil is attached, flow separation is minimal and vortex generators are fully retracted. At moderate angles nearing the onset of separation, the algorithm deploys vortex generators to heights between 0.5–0.7 mm to maximize efficiency gains. At post-stall conditions (α > 16°), full deployment (h_VG = 1.0 mm) is optimal to re-energize the boundary layer and delay stall, even at the expense of increased profile drag.
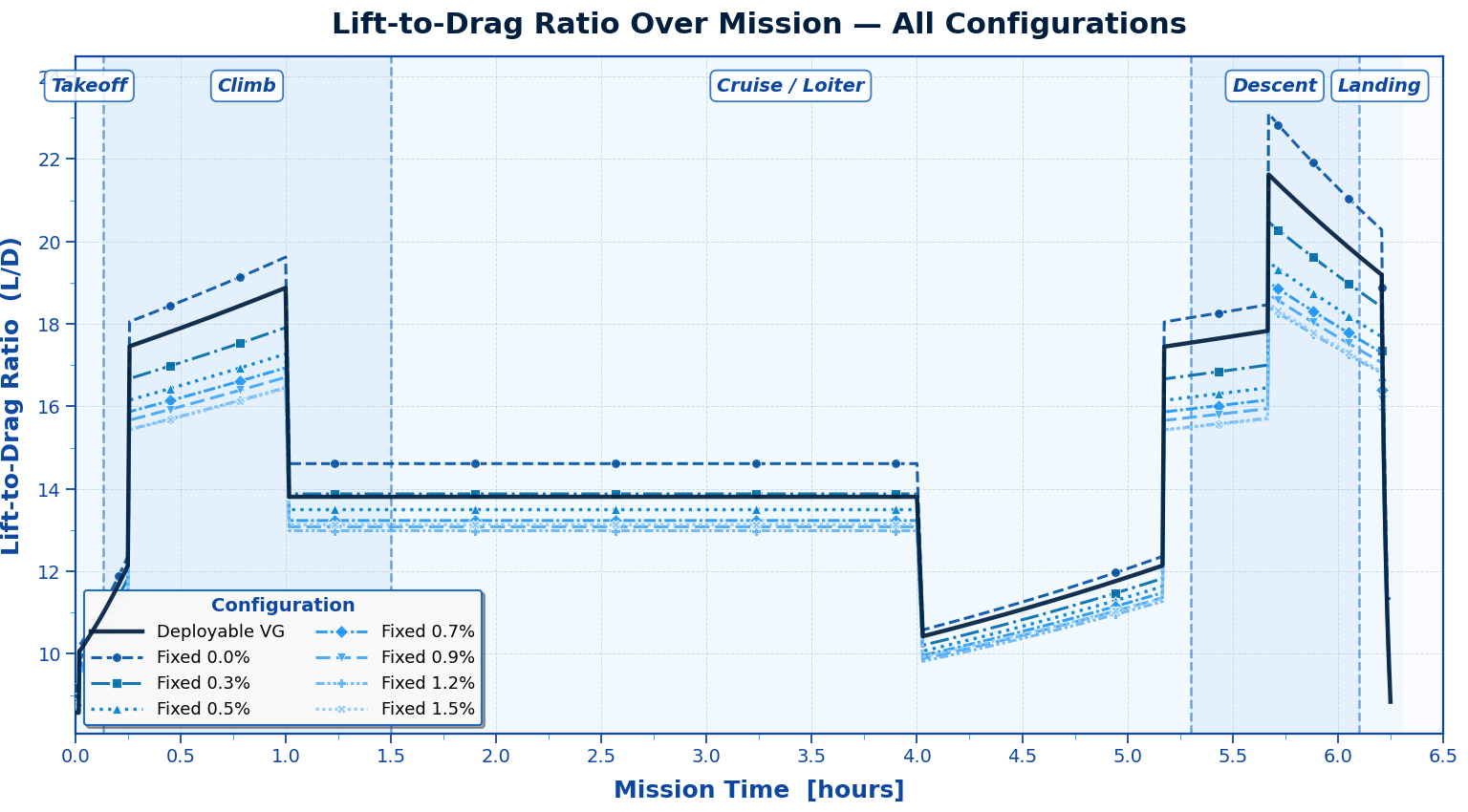
Aerodynamic efficiency from a realistic flight simulation, showing the deployable VG configuration outperforming the conventional 0.7% fixed VG setup while remaining below the clean airfoil, yielding 2.55% fuel savings and an 6.5% 𝑪_𝒍 / 𝑪_𝒅 improvement relative to the 0.7% baseline
This project successfully developed an AI-controlled deployable vortex generator system that outperformed fixed configurations in both aerodynamic efficiency and fuel consumption through continuous height optimization rather than binary deployment. The Gaussian Process framework enabled real-time predictions without online learning, extending previous deployable systems by replacing lookup tables with adaptive machine learning control across the full flight envelope. While validation was limited to flight simulation rather than wind tunnel or flight testing, and only a single airfoil geometry at moderate Reynolds numbers was evaluated, the results demonstrate that treating flow control device parameters as continuous control variables yields measurable efficiency gains. These findings are directly applicable to UAVs and light aircraft, with the multi-fidelity surrogate modeling approach generalizable to other flow control devices where adaptive systems can transform passive safety components into active optimization platforms for reducing aviation emissions.
Fuchi, K. W., Wolf, E. M., Makhija, D. S., Schrock, C. R., & Beran, P. S. (2022). Multi-fidelity machine learning applied to steady fluid flows. International Journal of Computational Fluid Dynamics, 36(7), 618–640. https://doi.org/10.1080/10618562.2022.2154758
Jayanarasimhan, K., & Balasubramanian, N. K. (2025). An overview of flow control in aerodynamic surfaces using vortex generators. Physics of Fluids, 37(3). https://doi.org/10.1063/5.0260937
Le Pape, A., Costes, M., Richez, F., Joubert, G., David, F., & Deluc, J.-M. (2012). Dynamic stall control using deployable leading-edge vortex generators. AIAA Journal, 50(10), 2135–2145. https://doi.org/10.2514/1.j051452
Leishman, J. G. (2023, January 1). Boundary layer flows. Introduction to Aerospace Flight Vehicles. https://eaglepubs.erau.edu/introductiontoaerospaceflightvehicles/chapter/introduction-to-boundary-layers/
Lin, J. C. (2002). Review of research on low-profile vortex generators to control boundary-layer separation. Progress in Aerospace Sciences, 38(4–5), 389–420. https://doi.org/10.1016/s0376-0421(02)00010-6
Mamman, R., Kotak, P., Weerakkody, T., Johnson, T., Krebill, A., Buchholz, J., & Lamuta, C. (2023). Deployable vortex generators for low Reynolds numbers applications powered by cephalopods inspired artificial muscles. iScience, 26(12), 108369. https://doi.org/10.1016/j.isci.2023.108369
Negoita, M.-F., & Hothazie, M.-V. (2024). A machine learning-based approach for predicting aerodynamic coefficients using deep neural networks and CFD Data. INCAS BULLETIN, 16(4), 91–104. https://doi.org/10.13111/2066-8201.2024.16.4.9
Portal-Porras, K., Fernandez-Gamiz, U., Zulueta, E., Ballesteros-Coll, A., & Zulueta, A. (2022). CNN-based flow control device modelling on aerodynamic airfoils. Scientific Reports, 12(1). https://doi.org/10.1038/s41598-022-12157-w
Reuss, R., Hoffman, M., & Gregorek, G. (1995). Effects of Surface Roughness and Vortex Generators on the NACA 4415 Airfoil. https://doi.org/10.2172/206541
Ritchie, H. (2024, April 8). What share of global co₂ emissions come from aviation?. Our World in Data. https://ourworldindata.org/global-aviation-emissions
Titchener, N., & Babinsky, H. (2015). A review of the use of vortex generators for mitigating shock-induced separation. Shock Waves, 25(5), 473–494. https://doi.org/10.1007/s00193-015-0551-x
Zhang, Y., Zhang, S., Jiang, F., Wu, Z., & Li, W. (2025). Predicting surface pressure fields and lift coefficients of subsonic airfoils by machine-learning-enhanced compressive sensing framework. Physics of Fluids (1994), 37(9). https://doi.org/10.1063/5.0282416