SpineAlign: Wearable Spinal Curvature Monitor
For our STEM2 Assistive Technology project, my team (CEO: Atharv Joshi, CIO: Abhiruph Seetha Raman, CTO: Arthur Rusaikin, and CMO: Isaac Moore) designed and built SpineAlign, a wearable spinal curvature monitor that provides real-time haptic biofeedback to help users correct poor posture. Over the course of the project, we went through six mechanical iterations and three CAD versions, following the full engineering design process from initial proof-of-concept to a fully encased, testable prototype.

The final SpineAlign 3D printout worn during a testing session.
Problem Statement
Nearly 80% of people in the United States experience lower back pain (LBP) at some point in their lives, costing the country a projected $60 billion annually. Poor spinal posture is one of the leading risk factors for LBP because it increases mechanical stress on the lower back, but it often goes unnoticed since it is tied to individual habits rather than conscious choice. There is a clear engineering need for a device that can remind users when their posture has reached an unhealthy level.
Target Audience
SpineAlign is designed for the general public, with a specific focus on people who work at desks for extended periods. This audience tends to remain stationary for long stretches of time, can respond to technological stimuli, and is able to adjust their posture based on haptic feedback, but often struggles with poor ergonomics and a lack of awareness of their long-term postural health.
Design Approach
We followed the engineering design process and used a Pugh chart and weighted decision matrix to evaluate four candidate designs against three commercial competitors (Upright GO 2, Straight Plus, and the Z-SPINE System). After comparing tradeoffs between accuracy, comfort, cost, and mechanical complexity, we moved from an initial 2-IMU architecture to a single-IMU design, which captured three-dimensional postural data using pitch, yaw, and roll while remaining smaller, lighter, and more comfortable for long-term wear.
Design Studies
We conducted three formal design studies to lock down key decisions. Study 1 compared 1-IMU versus 2-IMU architectures, leading us to the single-IMU design. Study 2 evaluated four attachment mechanisms on a 10-point Likert scale, with Nexcare waterproof tape winning at a composite score of 8.21/10. Study 3 used Ansys force simulations to select Nylon PA6 as the encasement material for its impact resistance, flexibility, and low friction against textiles.
Prototype and Results
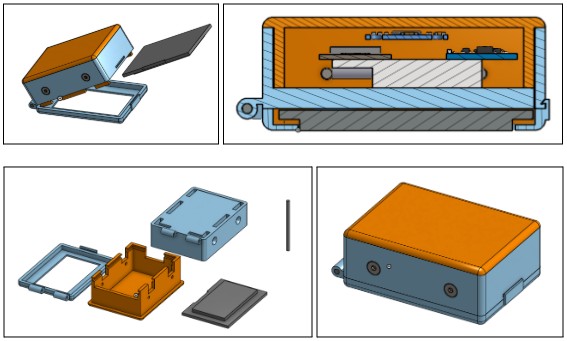
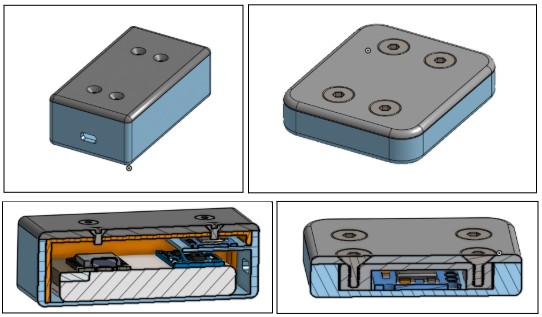
The final prototype uses an ESP32 microcontroller running MicroPython, a single IMU connected through an I2C multiplexer, a vibration motor for haptic feedback, LiPo batteries, a USB-C charging module, and a microSD card for local data logging, all housed in a 3D-printed Nylon PA6 encasement. The device creates its own WiFi access point ("PostureMonitor") so users can view live posture data in a browser at 192.168.4.1. Each session begins with a 10-second calibration period that captures the user's personal resting posture, after which the device flags deviations from that baseline and triggers a 2-second haptic alert. In testing, SpineAlign achieved 80.2% detection accuracy with a 0% false positive rate, satisfying all Level 1 requirements established at PDR.
Project Gallery
If you're having trouble viewing the PDF, click here!