STEM
STEM is a project-based class where we work on numerous individual and team-based projects. We also spend significant time researching our projects and doing writing assignments ranging from documentation to in-depth thesis and grant proposals. We have worked on projects such as a ‘Build Something’ in which we had to build an assistive device out of household items. Another area of focus was a long-term STEM project where we brainstormed ideas and then selected a project to focus on for Mass Academy science fair. I chose to design and build a cost-effective robotic arm. The arm would serve a dual purpose – it would be affordable for small businesses to implement and will also assist workers complete repetitive tasks faster and efficiently while minimizing discomfort.
COST-EFFECTIVE ROBOTIC ARM
Abstract
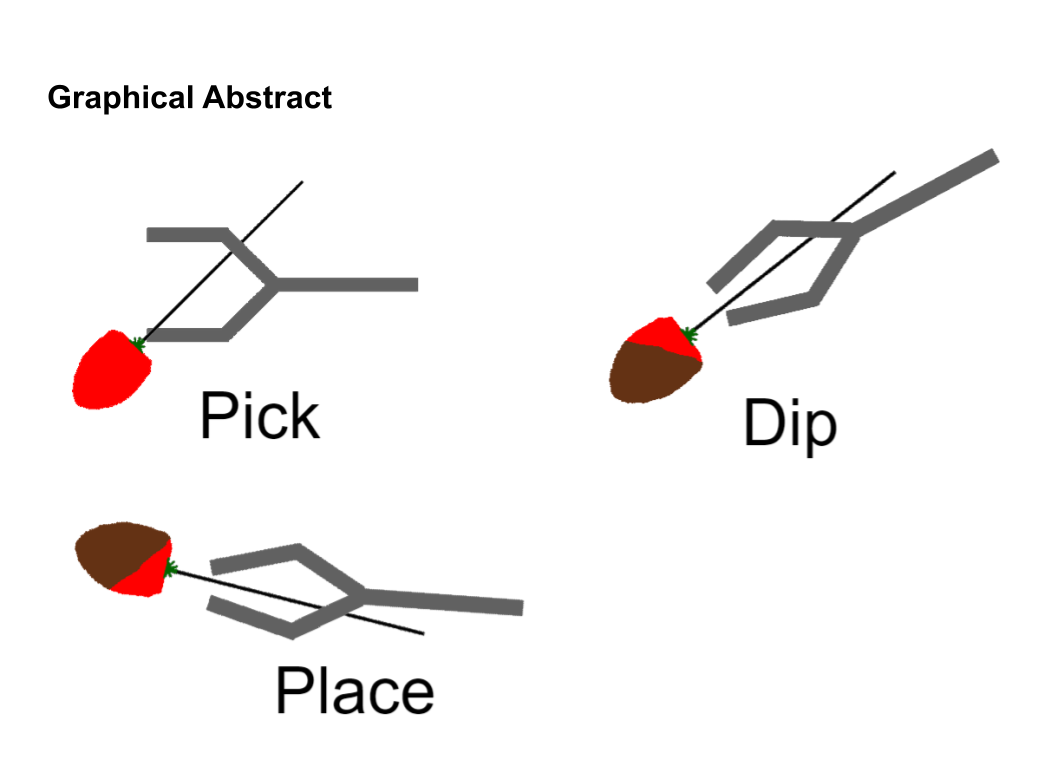
Many small businesses employ workers to perform tedious, repetitive tasks for long periods of time, which can cause joint pain. The aim of this project is to design a cost-effective robotic arm that can perform repetitive tasks like dipping fruits consistently and accurately. The initial robotic arm is intended to consistently dip strawberries into chocolate and accurately place them in a tray. The goal is to develop a final product that will cost less than $500 per unit to manufacture as some businesses cannot afford current industrial robotic arms, which cost between $5000 and $60,000. Therefore, the businesses have to hire humans to complete repetitive and tedious tasks. This project aims to create a cost-effective robotic arm to complete these repetitive tasks. First, a LEGO prototype was made to test the basic design and shape of the arm. Then, the parts were 3D printed and controlled with Arduino Uno and servo motors. The arm was able to accurately pick and place items into a specific location 85.75-94.11 percent of the time. The final product cost about $250 to manufacture, and it was within the limit. The arm is able to successfully complete the given task, meaning that it can now be used in an industrial setting. Next steps include expanding the arm's capabilities to complete tasks other than dipping strawberries. Additionally, adding extensions such as sensors may increase the accuracy and consistency of the arm.
Problem statement: Many small businesses employ workers to perform tedious, repetitive tasks for long periods at a time. This is not cost effective or efficient for the business. Additionally, workers can also develop joint pains due to the repetitive motion.
Engineering goal: The aim is to design a cost-effective robot that can dip fruits consistently and accurately. The initial robotic arm will focus on consistently dipping strawberries into chocolate and accurately placing them in a tray. The goal is that the final product will cost less than $500 per unit to manufacture.
Background
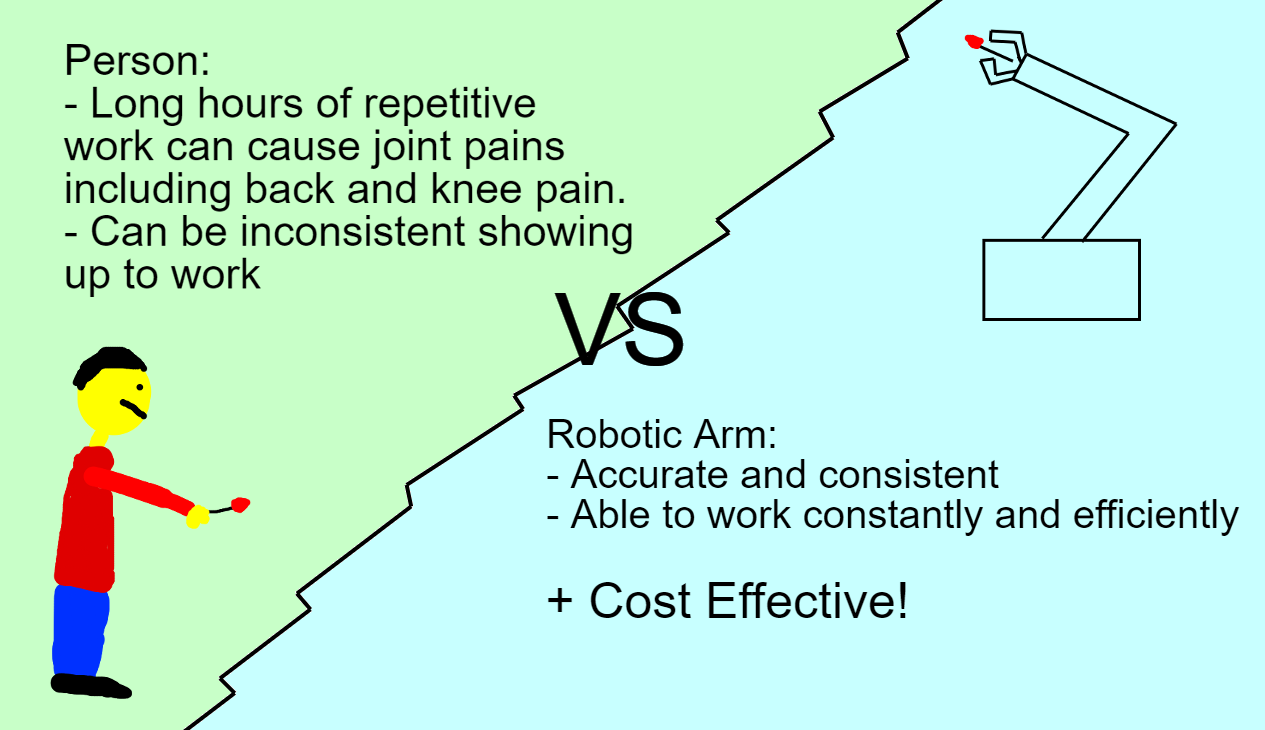
Many small businesses have workers who have to complete repetitive, tedious tasks such as preparing food. Completing these tasks for three or more hours a day can lead to workers developing joint pain, specifically in their backs, knees, or arms. A robotic arm can help the workers from having to complete these repetitive tasks, as well as free up the workers to complete other tasks that they are required to do. However, the robotic arms capable of completing these tasks are usually very expensive, sometimes costing up to $50,000 (Universal). Therefore, smaller businesses, such as those that prepare foods like chocolate dipped fruit, cannot afford this and need humans to complete these tedious tasks, thus causing the problem of joint pain.
Procedure
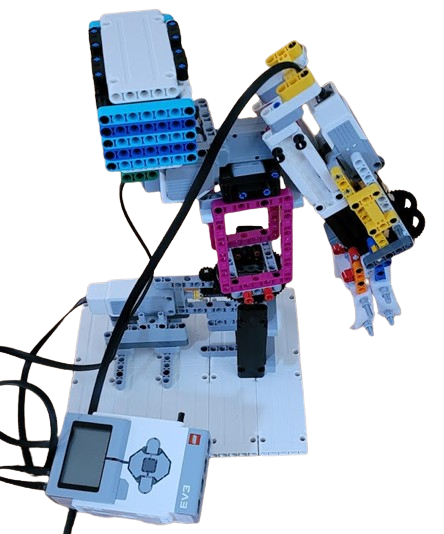
For the prototype, LEGO technic and LEGO Mindstorm pieces were used, and the arm was controlled by a LEGO EV3 brick as shown in the infographic (left). These pieces were used because LEGOs are easy to iterate with and can allow for easy modifications. However, the LEGO EV3 brain could only control four motors, and during testing with it, it was found out that a 5-DOF arm was needed in order to increase the mobility. To account for this limitation, the prototype was changed to using 3D printed pieces specifically designed for the robotic arm. For the final product, parts were printed using a Bambu Lab Carbon x1 printer, a Snapmaker 2.0 printer, and an Ender 3v3 ke. The files for these 3D printed pieces were made on Tinkercad, including some pieces from the Tinkercad libraries such as gears. Using a 3D printer allowed for the parts to be easier to make than using metal pieces, but the 3D printed pieces are also less durable since they are plastic, and partially hollow. The pieces were moved by 20 and 25 kg servo motors and controlled by an Arduino Uno programmed with Arduino IDE.
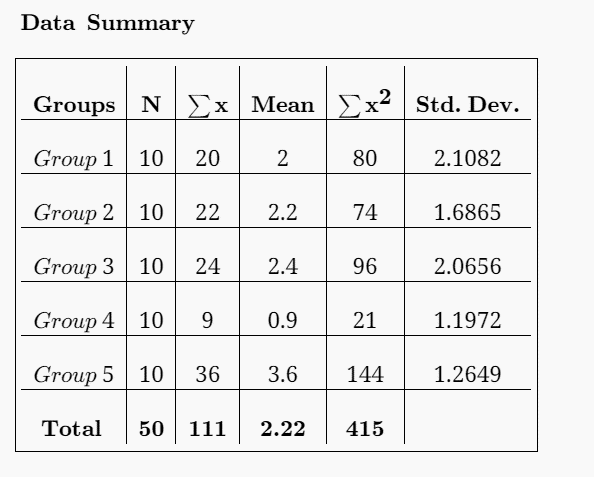
Figure 1: Statistical tests of tests regarding materials. The tests found that group 5 (foam) was the best material to increase the grip of the claw.
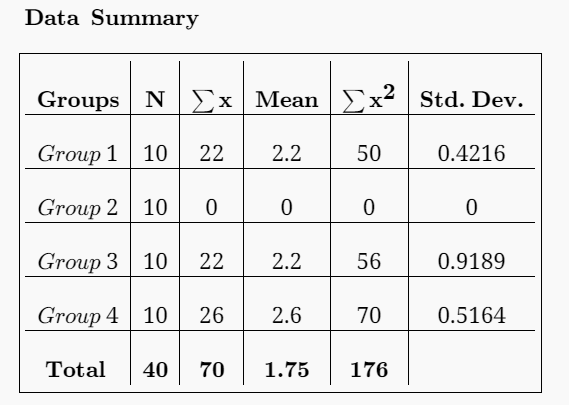
Figure 2: Statistical tests of tests comparing different models of grippers. The tests found that group 4 (an angled gripper) was the best at reducing space between the claws, thus resulting in the highest accuracy for placing the items.
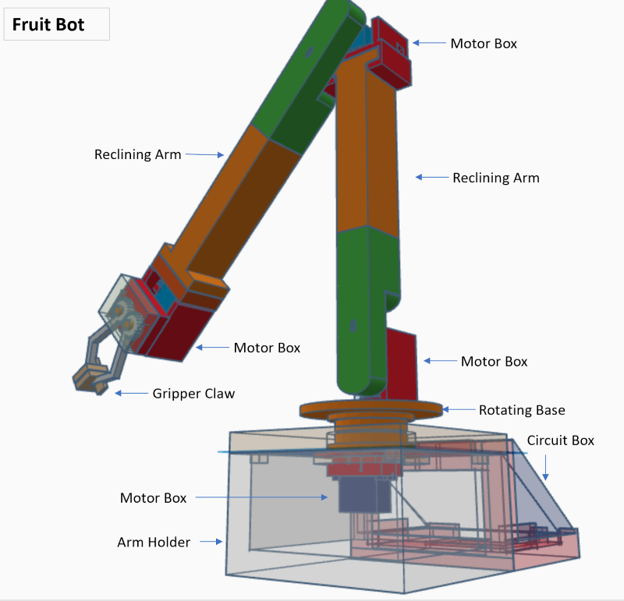
Figure 3: The final arm CAD with all 3D printed pieces placed in their correct positions, and annotated. Pieces are color coded with motors in navy blue and cyan (some are in red motor boxes).
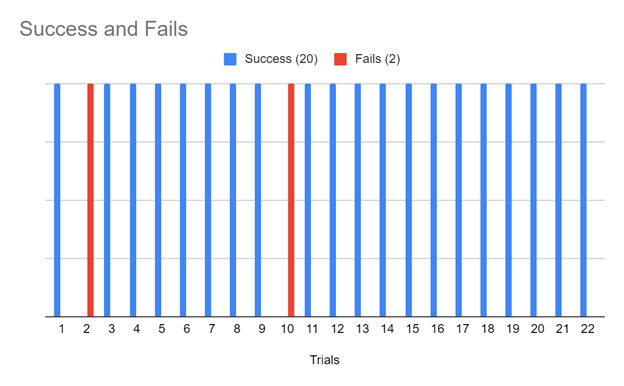
Figure 4: The results for the final arm. The arm had 22 trials, successfully picking and placing the strawberries 90.91% of the time and failing to pick and place the strawberries 9.09% of the time. The faliures were caused by motor difficulties, which could be fixed by using more expensive motors.
Analysis
The problem that many small businesses face is that they cannot afford industrial robotic arms because they are extremely expensive, and therefore must employ humans to complete repetitive and tedious tasks. The goal of this project is to create a cost effective robotic arm that costs less than $500 to manufacture. The arm should be accurate and consistent to properly complete the repetitive tasks, and in this case is being tested on its accuracy of picking and placing a strawberry, and the consistency of dipping it. The results for the testing were an accuracy of 85.75-94.11% for picking and an accuracy of 51.59-97.91% for placing. This shows that the arm was accurate enough to complete pick and place tasks. This shows that the arm can successfully repeat tasks with little variation. The arm cost about $250 to manufacture, fitting within the price limit.
Conclusion
The goal of this project was to design and construct a cost-effective robotic arm. This arm would be able to accurately pick skewers holding strawberries, dip the strawberries in melted chocolate, and place the skewers on a tray. A prototype of the arm was made with LEGO Mindstorm and LEGO Technic pieces, controlled by a LEGO EV3 brick. The robotic arm was built to test the overall shape of the arm, as well as to test what materials best helped the arm pick and grip the strawberry skewer consistently. The result of this test was that foam grippers were the best as foam provided the most friction and was also soft enough to consistently hold the strawberry skewer. Then, a final arm was made with custom designed 3D printed pieces and servo motors, controlled by an Arduino Uno board. Different gripper types were tested to see if the shape had an impact on the arm’s ability to grab. It was found that an angled gripper had the highest accuracy and consistency for picking the strawberry skewer. The final arm was tested for accuracy and consistency to pick up and place the strawberry skewer, as well as complete a dipping motion.
Refrences
Poster