STEM 2 (Assistive Technology)
STEM is a project-based class where we work on numerous individual and team-based projects. We also spend significant time researching our projects and doing writing assignments ranging from documentation to in-depth thesis and grant proposals. For our second STEM project, we focused on assistive technology. Though this project was similar to the STEM 1 project in terms of research, analysis, and design, for the STEM 2 project we worked in teams to build an assistive device.
HANS Inc. - The PowerBin
Problem statement: Clients with age-related muscle degradation, physical disabilities, and/or driveways that are difficult to traverse often struggle with moving their trash bin to the curb for pickup.
Engineering goal: The aim is to design a motorized trash bin that will allow clients to easily move their trash bins between the curb and house. The device will be safe, easy to use, reduce required force, and allow the user to easily complete the necessary task of moving the trash cans back and forth between the house and the curbside.
Our design is to take the trash can, and add two motors connected to the wheels by chains. The motors are controlled by motor controllers that receive signals from an Arduino board. The user will turn a potentiometer on the handles to adjust the motor controllers' speed. Finally, there are two buttons on the handles. If the user presses the button, the circuit gets completed and runs and allows the trash barrel to move effortlessly. When the button is not in a pressed state, the circuit is incomplete and it acts like a brake.

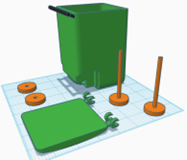
Figure 1: A CAD of the trash can to be 3D printed. An Arduino would then be able to control the motors to test the design of the trash can. A disassembled view is on the right.
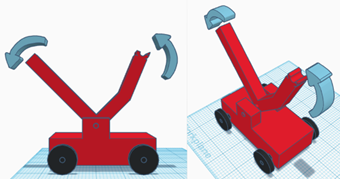
Figure 2: Another CAD of a possible design. This design is an external motorized cart that would push and pull the trash can. The design was tested, but ultimately was decided inferior to the model in Figure 1.
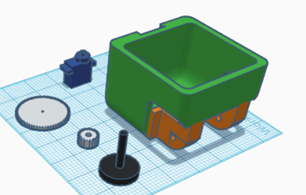
Figure 3: An adapted trash can. This design was made larger to better fit the Arduino and other components, and shorter to be easily accessed.
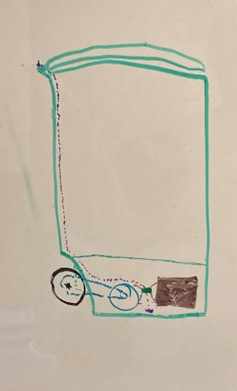
Figure 4: A drawing of the final version and where each component would be placed. The motors are blue, motor controllers are dark green, Arduino is purple, battery is brown, wheels are black, and the trash can is light green.
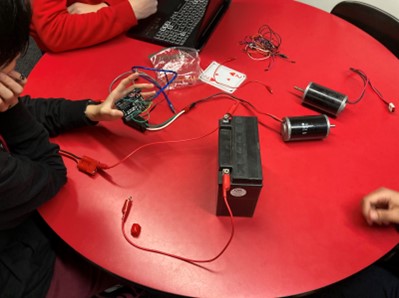
Figure 5: The circuits of the trash can before they were placed inside the trash can.

Figure 6: The wheels and chain mechanism of the trash can. The chain is then attached to the motor inside the trash can.
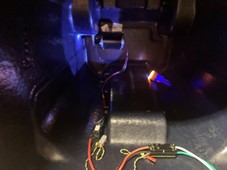
Figure 7: The interior of the trash can with all of the circuits installed.
Poster