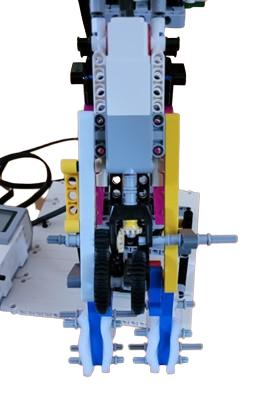
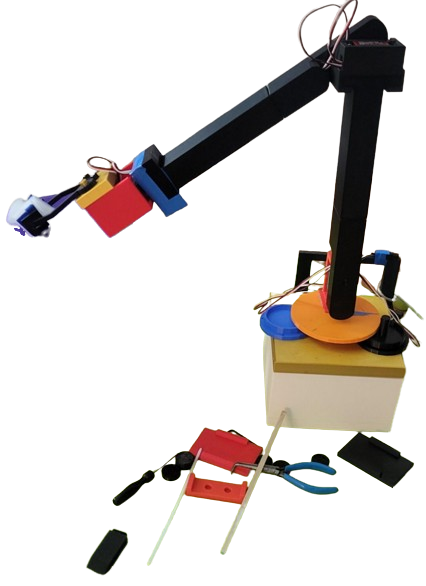
The LEGO prototype arm.
Many small businesses employ workers to perform tedious, repetitive tasks for long periods of time, which can cause joint pain. The aim of this project is to design a cost-effective robotic arm that can perform repetitive tasks like dipping fruits consistently and accurately. The initial robotic arm is intended to consistently dip strawberries into chocolate and accurately place them in a tray. The goal is to develop a final product that will cost less than $500 per unit to manufacture as many small businesses cannot afford current industrial robotic arms, which cost between $5,000 and $60,000. Therefore, the businesses have to hire humans to complete repetitive and tedious tasks. A cost-effective robotic arm will improve the efficiency of a small business and also help workers by completing these repetitive tasks. The use of this robotic arm can be expanded to perform pick and place jobs in warehouse and manufacturing setting. It can also be used to sort items in warehouses. Additionally, future iterations can be used for self-service in stores.
The LEGO prototype arm.
![Original arm CAD [incomplete]](images/armCad1.png)
The original incomplete CAD for the arm.
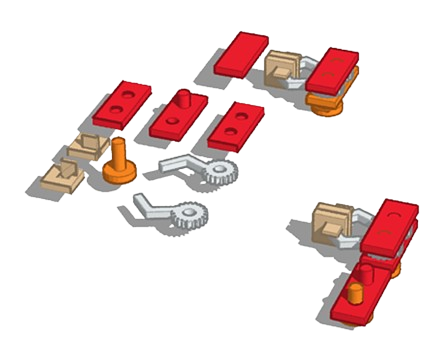
The gripper CAD both assembled and disassembled.
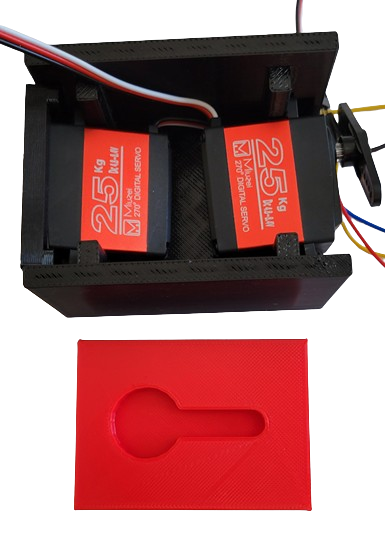
The motors for the gripper.
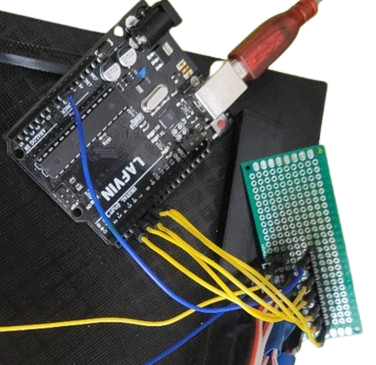
The circuit board and the Arduino brain for the arm.
The final 3D printed arm assembled.