Developing an Unmanned Aerial Vehicle Module for Wildfire Detection Using Image Recognition
Outline
The increasing prevalence of wildfires worldwide underscores the urgency of implementing early detection methods to mitigate their devastating impact on ecosystems and human infrastructure. Considering this, the objective of this project was to design and develop a device capable of rapidly identifying wildfires through live footage acquired by an autonomous system. This technology aims to play a role in enhancing responses to these increasingly frequent natural disasters.
Abstract
To decrease the hazardous qualities of abnormally destructive wildfires, this study designs an unmanned aerial vehicle (UAV)-based advance warning system for early detection of wildfires. Abnormally destructive wildfires have become increasingly prevalent in recent years. Existing systems for detecting these wildfires are not sufficiently effective. Early warning signs of wildfires often manifest as trailing indicators -- distinguished by their rapid diffusion regardless of wind speed -- which include the concentration of particulate matter in the air, carbon monoxide levels, and nitrogen dioxide levels. Object detection involves the use of algorithms to identify and categorize objects within an input image or video. Modern object detection algorithms leverage deep learning and convolutional neural networks. The widely-used You Only Look Once object detection algorithm was trained on a dataset of wildfire footage and deployed on a Raspberry Pi with a webcam. The signal of a carbon monoxide sensor was weighted based on testing data and combined with the output of the image recognition algorithm to produce a final probability. A global positioning system module was also added to provide location data. The long-term goal is to create a completely autonomous UAV-based system to identify, track, and communicate wildfire location data. The work proposed here is scalable to many instances, with communications interior to the system available. Depending on the number of instances, the system has the potential to support surveillance in a much greater quantity than existing solutions with equal or greater efficiency.
Research Proposal
Phrase 1
Abnormally destructive wildfires have become increasingly prevalent in recent years. Existing systems for detecting these wildfires are not sufficiently effective.
Phrase 2
The goal of this project was to develop an unmanned aerial vehicle (UAV) module capable of accurately detecting and communicating wildfires.
Background
Wildfire Damage and Warning Signs
Wildfires are large-scale, destructive fires that spread quickly. While wildfires do not usually occur as a direct consequence of human involvement, anthropogenic climate change has greatly increased the rate at which wildfires occur, as well as the amount of area that is burned (Turco et al., 2023). Early warning signs of wildfires often manifest as trailing indicators – abnormal trends that precede the transformation of a small flame into a large wildfire. These indicators – distinguished by their rapid diffusion regardless of wind speed – include the concentration of particulate matter in the air, carbon monoxide levels, and nitrogen dioxide levels (Bhowmik et al., 2023).
Object Detection
Object detection involves the use of algorithms to identify and categorize objects within an input image or video. These algorithms make predictions about bounding boxes to pinpoint the precise locations of each object. Modern object detection algorithms leverage deep learning and convolutional neural networks. The majority of object detection architectures comprise two key components: a feature extractor and a meta-architecture. Initially, the feature extractor, which can be based on networks like VGG, MobileNet, Inception, or ResNet, processes the images through a convolutional neural network to extract relevant features. Subsequently, the data is forwarded through a meta-architecture, which outputs overall detection data of the image. Region-Based Convolutional Neural Networks (R-CNNs) consist of a region proposal network (RPN) responsible for identifying potential regions where objects might be located. Then, an R-CNN utilizes a separate neural network to predict the bounding boxes and object classifications for each object (Girshick et al., 2014). On the other hand, Single-Shot Detector (SSD) models function as a single deep-learning neural network with additional convolutional layers to make predictions about bounding boxes and object classifications (Liu et al., 2016). SSD models generally offer quicker computational speed but may exhibit lower accuracy when dealing with smaller objects compared to R-CNN models (Huang et al., 2017).
Methodology
Figures
Analysis
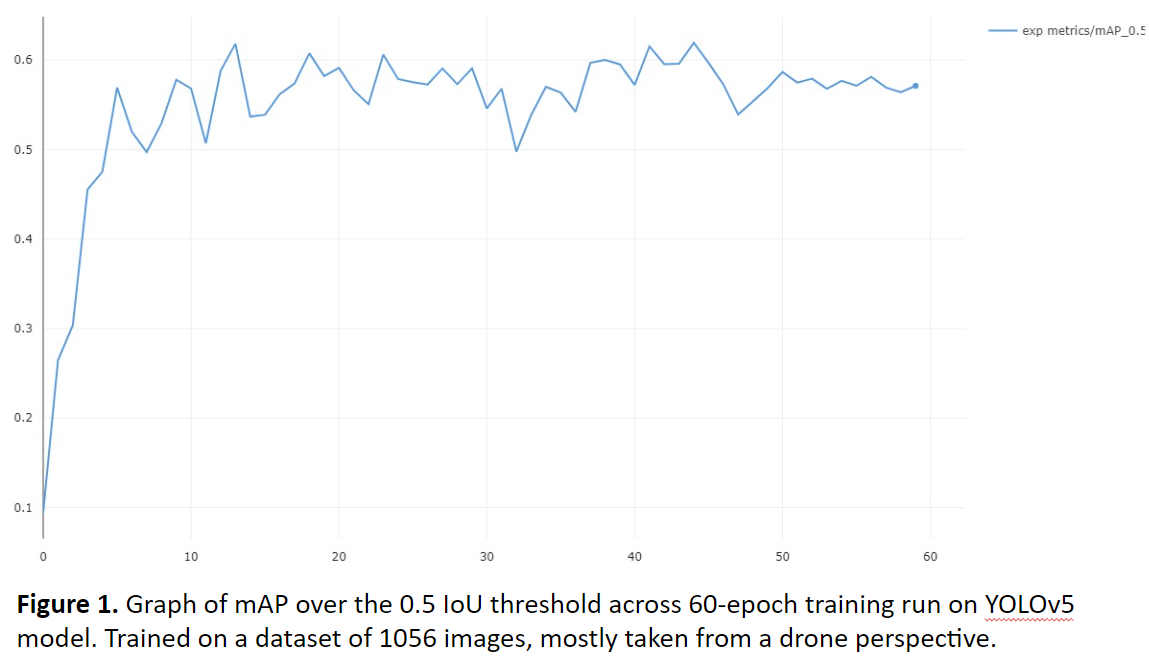
The fire detection system performed somewhat accurately in the simulated testing scenarios, with a measured accuracy of 76%. While the overall accuracy did not reach the expected level of 85%, the device has the potential to be viable in live scenarios with further tuning. The GPS module was tested be accurate within 10 meters of longitude, latitude, and altitude 98% of the time. A Wilcoxon signed-rank test was performed on the trained models in order to test for an improvement in accuracy. The statistic chosen was the mAP over the 0.5 IoU threshold. The p-value indicated was less than 0.05, which shows that there is enough evidence to reject the null hypothesis. There is sufficient evidence to conclude that the chosen model had a greater median Accuracy Percentage over the 0.5 IoU threshold.
Conclusion
The module shows considerable potential. The system was successful in detecting and reporting wildfires with reasonable accuracy. However, modifications to the object detection algorithm are necessary if the device is to be deployed for live testing or usage. More specifically, different training methods or architectures should be tested in order to increase the accuracy of the algorithm. Ideally, this system would be easily implemented on a UAV as a lightweight module, and scalable to many UAVs to create a comprehensive wildfire detection system, capable of surveying large areas and communicating accurate data.
References
Bhowmik, R. T., Jung, Y. S., Aguilera, J. A., Prunicki, M., & Nadeau, K. (2023). A multi-modal wildfire prediction and early-warning system based on a novel machine learning framework. Journal of Environmental Management, 341, 117908. https://doi.org/10.1016/j.jenvman.2023.117908
Dalal, N., & Triggs, B. (2005). Histograms of oriented gradients for human detection. 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), 1, 886–893 vol. 1. https://doi.org/10.1109/CVPR.2005.177
Dewangan, V., Saxena, A., Thakur, R., & Tripathi, S. (2023). Application of Image Processing Techniques for UAV Detection Using Deep Learning and Distance-Wise Analysis. Drones, 7(3), Article 3. https://doi.org/10.3390/drones7030174
Girshick, R., Donahue, J., Darrell, T., & Malik, J. (2014). Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. 2014 IEEE Conference on Computer Vision and Pattern Recognition, 580–587. https://doi.org/10.1109/CVPR.2014.81
Huang, J., Rathod, V., Sun, C., Zhu, M., Korattikara, A., Fathi, A., Fischer, I., Wojna, Z., Song, Y., Guadarrama, S., & Murphy, K. (2017). Speed/Accuracy Trade-Offs for Modern Convolutional Object Detectors. 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 3296–3297. https://doi.org/10.1109/CVPR.2017.351
Leng, G., Qian, Z., & Govindaraju, V. (2014). Multi-UAV Surveillance over Forested Regions. Photogrammetric Engineering & Remote Sensing, 80(12), 1129–1137. https://doi.org/10.14358/PERS.80.12.1129
Lin, T.-Y., Maire, M., Belongie, S., Bourdev, L., Girshick, R., Hays, J., Perona, P., Ramanan, D., Zitnick, C. L., & Dollár, P. (2015). Microsoft COCO: Common Objects in Context (arXiv:1405.0312). arXiv. https://doi.org/10.48550/arXiv.1405.0312
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu, C.-Y., & Berg, A. C. (2016). SSD: Single Shot MultiBox Detector. European Conference on Computer Vision, 9905, 21–37. https://doi.org/10.1007/978-3-319-46448-0_2
Sathishkumar, V. E., Cho, J., Subramanian, M., & Naren, O. S. (2023). Forest fire and smoke detection using deep learning-based learning without forgetting. Fire Ecology, 19(1), 9. https://doi.org/10.1186/s42408-022-00165-0
Turco, M., Abatzoglou, J. T., Herrera, S., Zhuang, Y., Jerez, S., Lucas, D. D., AghaKouchak, A., & Cvijanovic, I. (2023). Anthropogenic climate change impacts exacerbate summer forest fires in California. Proceedings of the National Academy of Sciences, 120(25), e2213815120. https://doi.org/10.1073/pnas.2213815120