STEM I
STEM I is part of the
STEM course taught by Dr. Crowthers, and it occurs during August
through February. Students complete an Independent Research Project of
their own topic choice. This involves brainstorming, background
research, methodology, data collection, and reaching conclusions. Students
practice technical writing, including a Grant Proposal and a Thesis.
Quad Chart
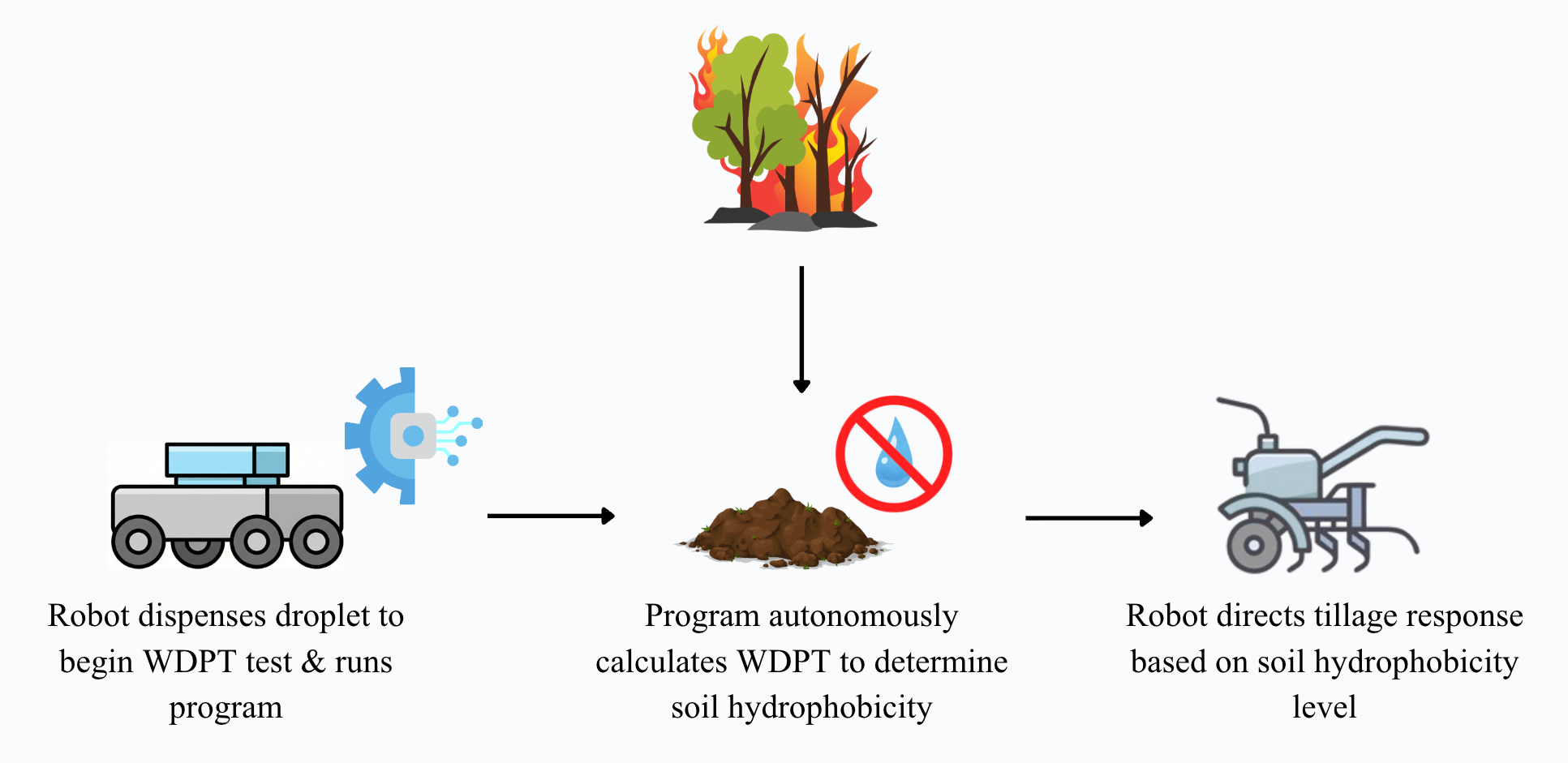
This Quad Chart gives a
summary of my Independent Research Project. In my project, I am
designing a robot that detects water repellent soils in post-wildfire
environments and provides treatment through soil scarification. The
purpose of this project is to accelerate ecosystem recovery after
wildfires.
Wildfires are becoming increasingly frequent,
devastating ecosystems and degrading soil health. These disasters
promote hydrophobic soil, which repels water and prevents plant
regrowth. This project addresses that challenge by automating the
detection and treatment of water-repellent soil. By designing a robot
that performs soil hydrophobicity testing and delivers an adaptive
treatment response, this system aims to accelerate land recovery after
wildfires.
Abstract
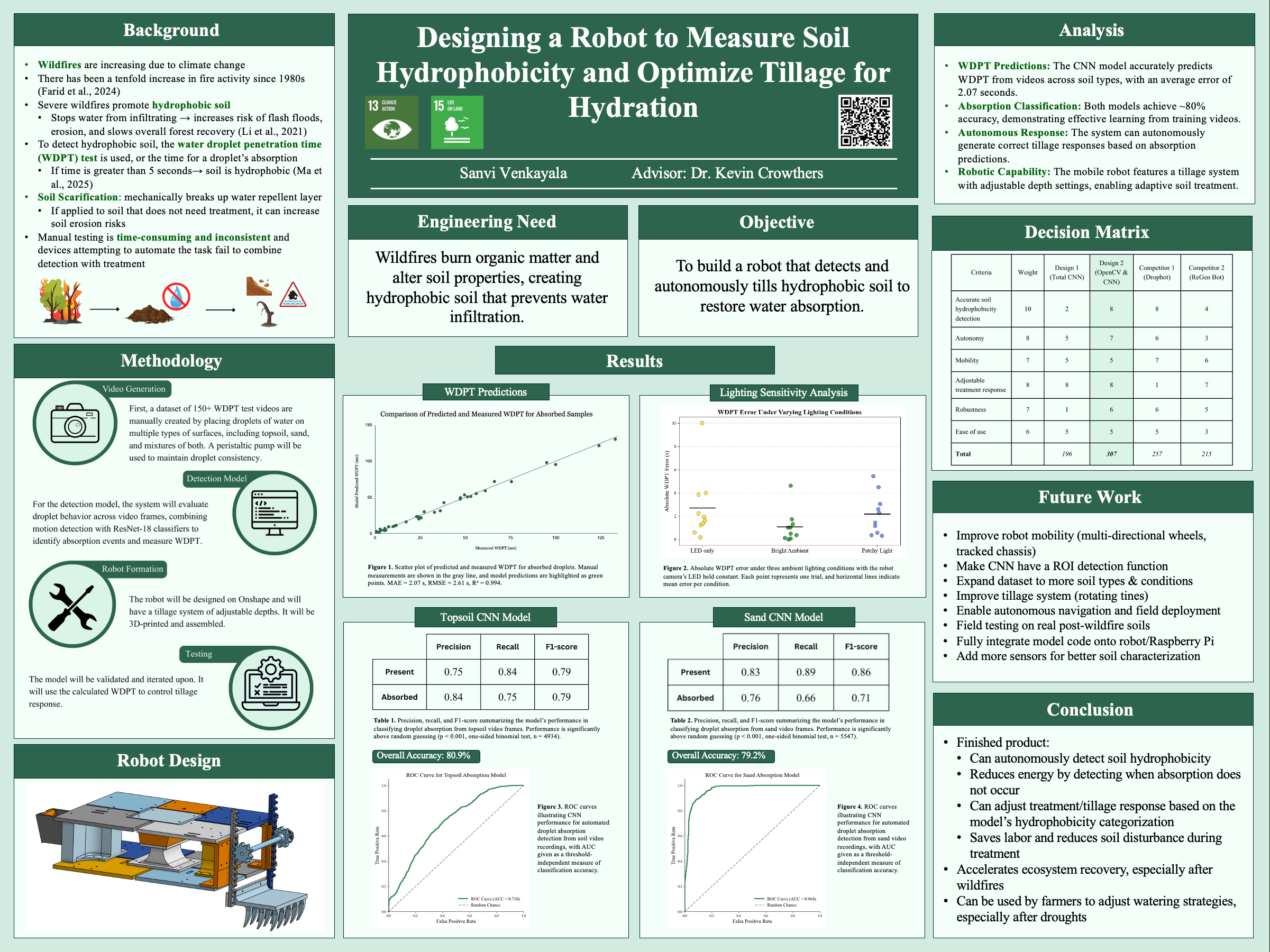
Engineering Need
Wildfires burn organic matter and alter
soil properties, creating hydrophobic soil that prevents water
infiltration.
Objective
To build a robot that detects and
autonomously tills hydrophobic soil to restore water absorption.
Background

As global climates become warmer and drier, wildfires are becoming
increasingly frequent. Since the 1980s, there has been a tenfold
increase in fire activity, burning millions of hectares of land
worldwide. Large wildfires have increased in the United States at a
frightening pace and are predicted to continue due to the changing
climate and human activities (Farid et al., 2024). These events have
substantial hydrogeological impacts, including effects on soil
health and stability.
During high-severity
wildfires, organic compounds such as waxes, lipids, and resins in
vegetation are vaporized. These gases condense in the cooler soil
layers as they move downwards, creating a hydrophobic coating that
prevents water penetration. Soil hydrophobicity refers to a property
of soil that repels water. A hydrophobic layer of soil prompts many
issues, such as sediment in waterways, increased risk of debris
flows and flash floods, higher erosion risks, and nutrient loss. The
strength and depth of the hydrophobic layer can depend on the
intensity and temperature of the wildfire, with water repellency
increasing significantly between 175°C and 270°C. It can be seen in
various textures of soil and often restores itself gradually with
time (Li et al., 2021). However, water-repelling soil still hinders
seed germination, plant growth, and overall ecosystem health, making
its quick restoration critical. Furthermore, standard vegetation
efforts will not be successful if the hydrophobic layer is not
broken. Seeds will be less likely to germinate, and plants will
struggle to access moisture.
One common method of
detecting hydrophobic soil is the water droplet penetration time
(WDPT) test. This test examines the time it takes for a water
droplet to infiltrate the soil completely and is often used in the
field to determine soil hydrophobicity. A material is considered
water repellent if the time calculated is greater than 5 seconds. As
time increases, the soil is classified as more hydrophobic (Ma et
al., 2025). For instance, a WDPT time greater than one minute
indicates strongly water repellent soil. The WDPT test is commonly
preferred over other techniques because it is inexpensive and easy
to perform in the field (Dekker et al., 2009).
After identifying hydrophobic
areas, it is essential to treat the soil to prevent further
degradation and to speed up the soil recovery process.
Soil scarification through methods such as raking and
tillage have been observed to improve water infiltration (Amami et
al., 2021). Scarification mechanically breaks up the water-repellent
layer of the soil and can increase its porosity, improving water
penetration. Studies show that seeding combined with soil
scarification has more seed growth than seeding without
scarification (Rhoades et al., 2015). However, soil scarification
has its risks. When applied to soil that is not hydrophobic, it can
increase erosion risks by loosening the soil, making it vulnerable
to factors such as wind. This
makes distinguishing between hydrophobic and non-hydrophobic soil
critical before treatment. Furthermore, the depth of the soil
scoring should be carefully considered. While a lack of
scarification can increase the chances of soil hydrophobicity, deep
scarification can reduce organic matter in the soil (Šimon et al.,
2009). As a result, breaking up the soil at an appropriate depth
relative to the soil’s degree of hydrophobicity is the
most effective method of water repellent soil recovery.
WDPT
testing and tillage are time-consuming tasks prone to human
inconsistencies (Wang et al., 2024). To make the process more
effective and accurate, robots can be used to automate these tasks.
Automation is especially important in post-wildfire environments,
where terrain is unstable and unpredictable. One system addressing
post-wildfire soil analysis is the Dropbot, a drone that conducts
real-time hydrophobicity testing on rough terrain. It uses
camera-captured droplets with AI analysis and light sensors to
conduct WDPT testing. Its on-site data processing allows it to gain
results without needing laboratory testing. Through these
components, the Dropbot provides a field-ready system for soil
characterization (Prakash, 2025). However, its primary focus is on
data testing and acquisition rather than soil recovery and
improvement. Another project for soil rehabilitation is the
ReGenBot, a robot designed for soil analysis and treatment
distribution. ReGenBot is a ground robot powered by solar energy
that is equipped with tank treads for mobility and ultrasonic
sensors for obstacle detection. It is able to collect data on
nutrient content, temperature, and soil moisture and then distribute
fertilizers and treatment based on user specifications. By measuring
soil properties and delivering treatment, ReGenBot improves soil
recovery. Still, this system mainly targets soil nutrients rather
than hydrophobicity detection or physical soil restoration.
Additionally, it depends on user interpretation of data and lacks
autonomous decision-making (Vinokurova et al., 2022).
Although current robotic systems have improved post-wildfire soil
analysis and treatment distribution, some limitations remain.
Existing solutions focus on either soil characterization or
treatment, rather than combining both processes into a single
system. Additionally, many systems rely on user interpretations and
fail to respond autonomously to the variability seen in hydrophobic
soil. As a result, treatments may be added inefficiently or
inappropriately, increasing erosion risks. These constraints
highlight the need for a more targeted and responsive approach to
post-wildfire hydrophobic soil recovery.
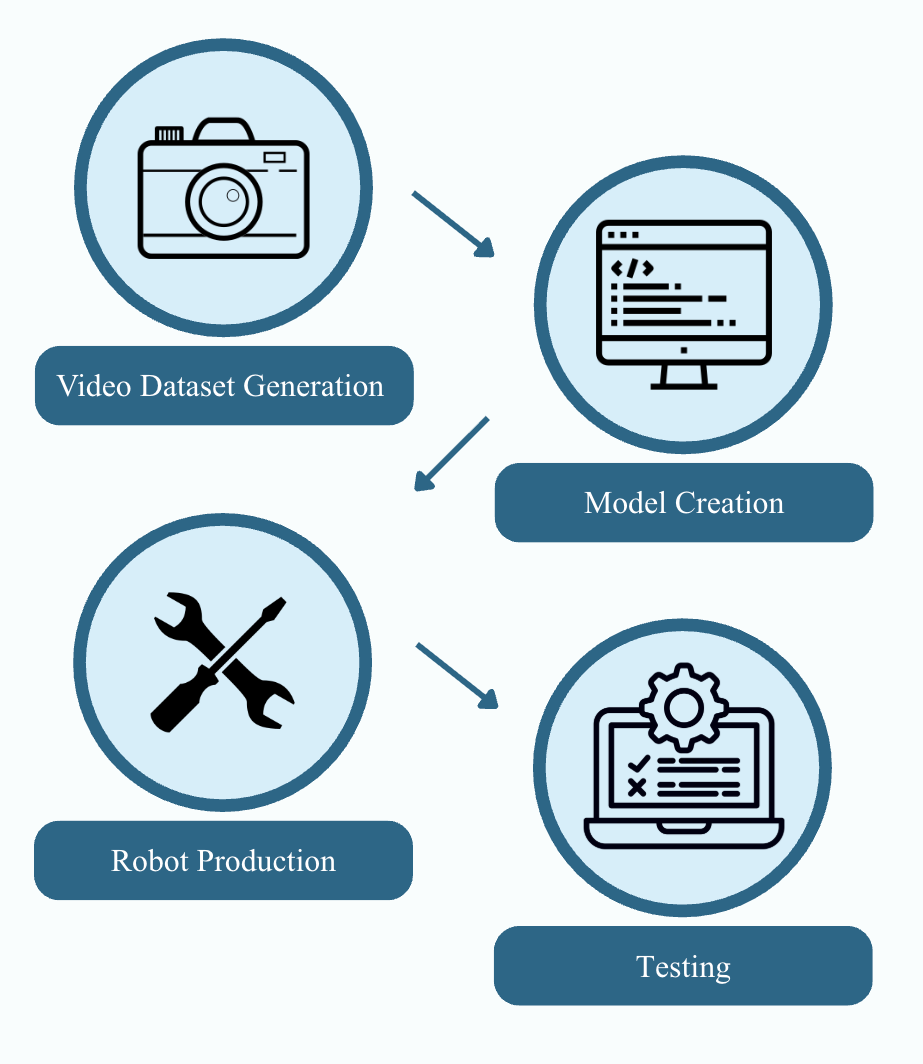
Procedure
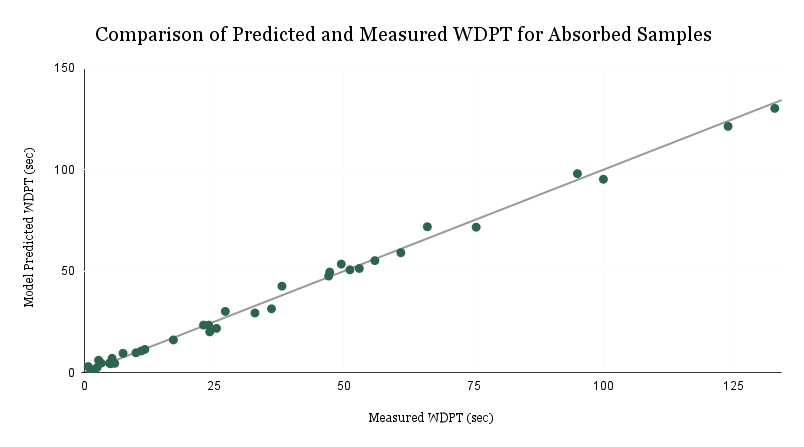
Figure 1. Scatter plot of predicted and measured WDPT for
absorbed droplets. Manual measurements are shown in the gray line,
and model predictions are highlighted as green points. MAE = 2.07 s,
RMSE = 2.61 s, R² = 0.994.
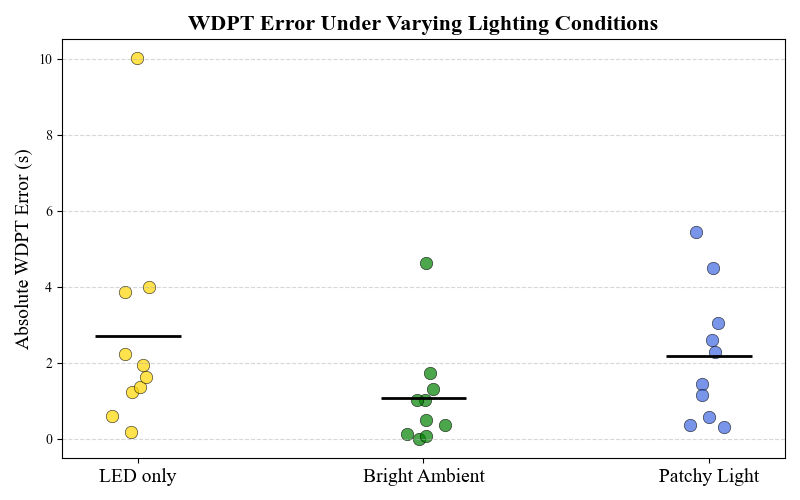
Figure 2. Absolute WDPT error under three ambient lighting
conditions with the robot camera’s LED held constant. Each point
represents one trial, and horizontal lines indicate mean error per
condition.
Topsoil CNN Model
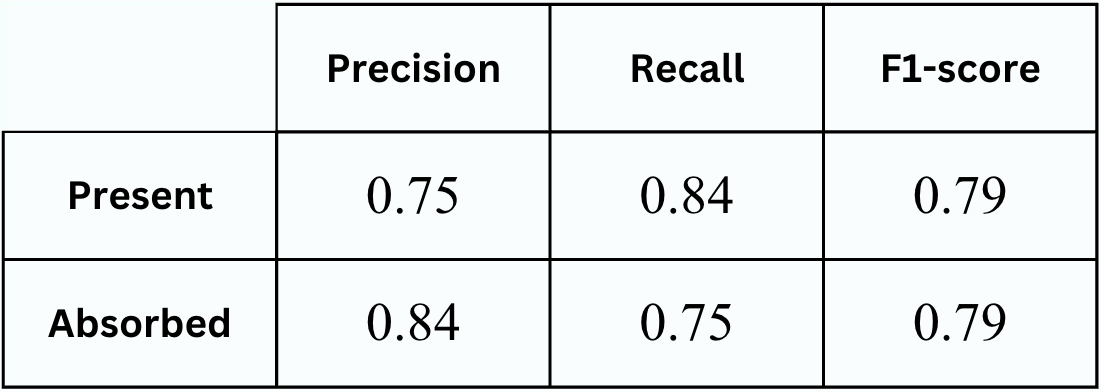
Table 1. Precision, recall, and F1-score summarizing the
model’s performance in classifying droplet absorption from topsoil
video frames. Performance is significantly above random guessing (p
< 0.001, one-sided binomial test, n = 4934).
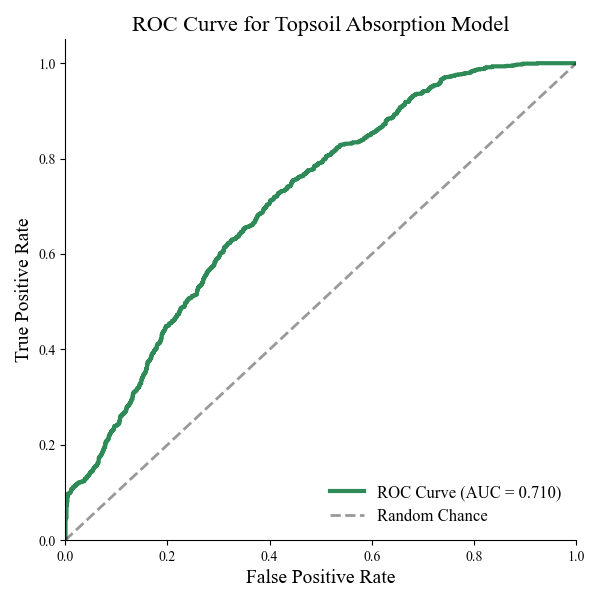
Figure 3. ROC curves illustrating CNN performance for
automated droplet absorption detection from soil video recordings,
with AUC given as a threshold-independent measure of classification
accuracy.
Sand CNN Model
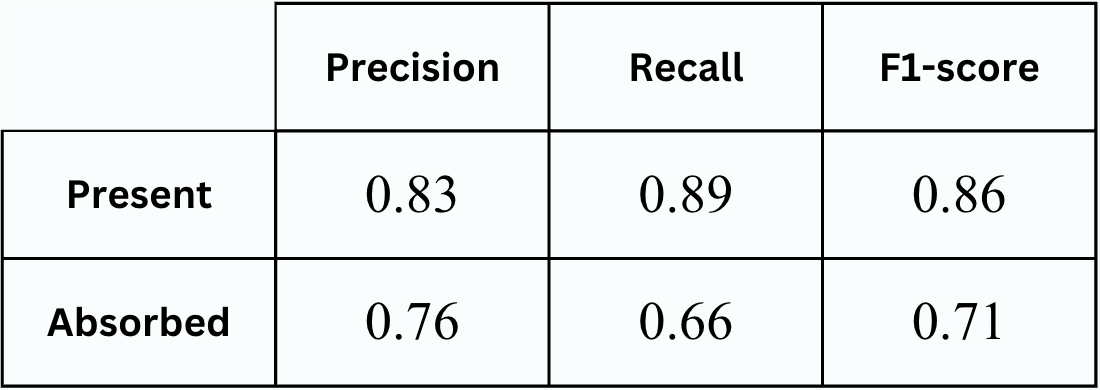
Table 2. Precision, recall, and F1-score summarizing the
model’s performance in classifying droplet absorption from sand
video frames. Performance is significantly above random guessing (p
< 0.001, one-sided binomial test, n = 5547).
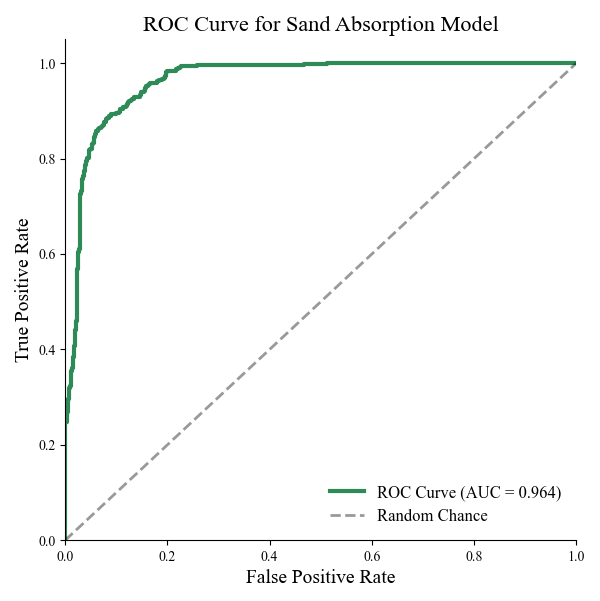
Figure 4. ROC curves illustrating CNN performance for
automated droplet absorption detection from sand video recordings,
with AUC given as a threshold-independent measure of classification
accuracy.
Analysis
The objective of this project was
to develop and evaluate a video-based model for detecting droplet
presence and conducting the water droplet penetration time (WDPT) test
to indicate soil hydrophobicity. From the model’s results, the created
robot would apply the appropriate level of tillage. Overall, the
model, which includes the OpenCV and machine learning aspects,
demonstrated the ability to detect absorption events. For the WDPT
calculations with OpenCV, the program displayed strong agreement with
the actual measurements, with a low MAE of 2.07 seconds. To categorize
soil hydrophobicity, water droplet penetration time (WDPT) is
evaluated in time-based ranges. Therefore, the model does not require
exact temporal precision to guide robotic treatment responses and
gauge soil condition. As the program is reliant on video background
and searching for difference in pixels, lighting condition could be a
variable affecting the model. Since the camera has LED lights
permanently connected to it, the external lighting was changed, and
even with no light or patchy light, the program was still able to run
and have mean errors less than 3 seconds (Figure 2). This shows that
while the model could be improved and adjust to work better in
different lightings, it still works with similar accuracy. To complete
the model, the ResNet18-based CNNs were trained on video frames to
identify droplet presence or absorption. The confusion matrices
demonstrate that the model correctly categorized many frames and has
accuracies of around 80%. Precision, recall, and F1-score were also
above 50%, so the model was able to find most frames of a specific
outcome and correctly classify them (Tables 1 & 2). The ROC/AUC graphs
show that the sand model has high confidence and accuracy when ranking
a positive case over a negative one (Figures 3 & 4). The topsoil
model, however, seems to have less confidence, but it’s accuracy
(0.809) shows that it has more borderline cases but can still classify
frames correctly. Overall, the model accomplished the goal of
detecting soil hydrophobicity by analyzing WDPT data.
Discussion & Conclusion
As shown in the model’s accuracy and classification metrics, there is
room for improvement, especially the sand model’s bias for predicting
droplet presence. However, model performance can be enhanced by
inputting a more balanced set of data and including more data points.
Originally, the model contained only a convolutional neural network
that was fed frames labeled such that the time before droplet landing,
droplet presence, and droplet absorption were separated. However, the
model could not learn from the data and missed many droplet landings
as well as had a high error (MAE = 14.3 seconds). From this, I
realized a hybrid approach with computer vision would be effective and
require less data. Now, the program performance is undeniably above
random guessing (p < 0.001). A one-sided binomial test was used to
prove significance, as it is commonly used to evaluate classifier
accuracy.
As for the robot, a 3D-printed base was produced along with
a tiller system using a rack-and-pinion attachment. The robot has a
peristaltic pump to produce identical droplets, and a camera is
attached over the water dropper to take a video of the water
absorption. For mobility, the robot has four wheels, and another motor
is used to control tillage depth. Based on the model’s predictions,
the robot is able to adjust its tillage depth.
This work adds onto previous devices for soil hydrophobicity
testing, such as the Dropbot, by adding a treatment option.
Additionally, while other models such as ActionFormer utilize temporal
action localization (TAL) to pinpoint droplet landing and perform the
WDPT test, none include a video cutoff function to make it usable in
the field (Wang et al., 2024). My model cuts off the videos at around
2 minutes so that it does not spend exorbitant amounts of time
measuring the WDPT when it can take minutes to hours. Its ability to
detect cases where absorption does not occur allows the cutoff to be
effective and improves robot efficiency in the field. The created
product will improve treatment of these soils because it acknowledges
the variability in soil hydrophobicity and provides specialized
remedies. Additionally, the dataset of WDPT videos could help increase
understanding of water dynamics in soil. Essentially, all objectives
were met. The robot is mobile, and the model can predict WDPT and
direct tillage. Future Research In the future, the robot could be
improved upon to be more mobile and able to navigate rough terrain. As
of right now, my robot has simple wheels, but with a tracked chassis,
it could be more robust. Additionally, to make model predictions more
accurate in the field, the model could have a ROI detection function.
This would help with cases where droplets roll off the fixed ROI area,
which would happen quite often on forest floor. Furthermore, the
model’s accuracy can increase with more varied data. To further
improve the model, the robot could be changed to provide a more
controlled environment, such as by enclosing the droplet area and
prepping the soil beforehand. By making the model and robot more
versatile, this work could be used more successfully on post-wildfire
soils and make a significant impact.
Ultimately, this work establishes a foundation for
intelligent robotic systems capable of responding autonomously to
environmental damage, helping transform post-wildfire recovery efforts
from broad treatments to targeted, data-driven restoration.
References
February Fair Poster