STEM with Science and Technical Writing is a class taught by Dr. Crowthers and is divided into two sections: STEM I and STEM II. STEM I includes one major independent research project, and can be of an area of science of your choosing. The first half of the year involves researching, improving presentation skills, and working on our project in preparation of December Fair and February Fair, where we get to present our preliminary data and completed project, respectively.
I chose an engineering independent research project for STEM I, and I am designing a wearable assistive device that will be able to counteract the wobbling present in cats with cerebellar hypoplasia. Cerebellar hypoplasia is a neurological condition that can lead to wobbly movement, lack of balance, and poor coordination due to an underdeveloped cerebellum. This is not painful to the cat, but can cause frustration as they cannot eat, drink, or walk properly without stumbling or falling. I chose this topic for my independent research project because I work at a cat-only animal shelter that has cats with cerebellar hypoplasia in their care, and I wanted to find a way to help them!
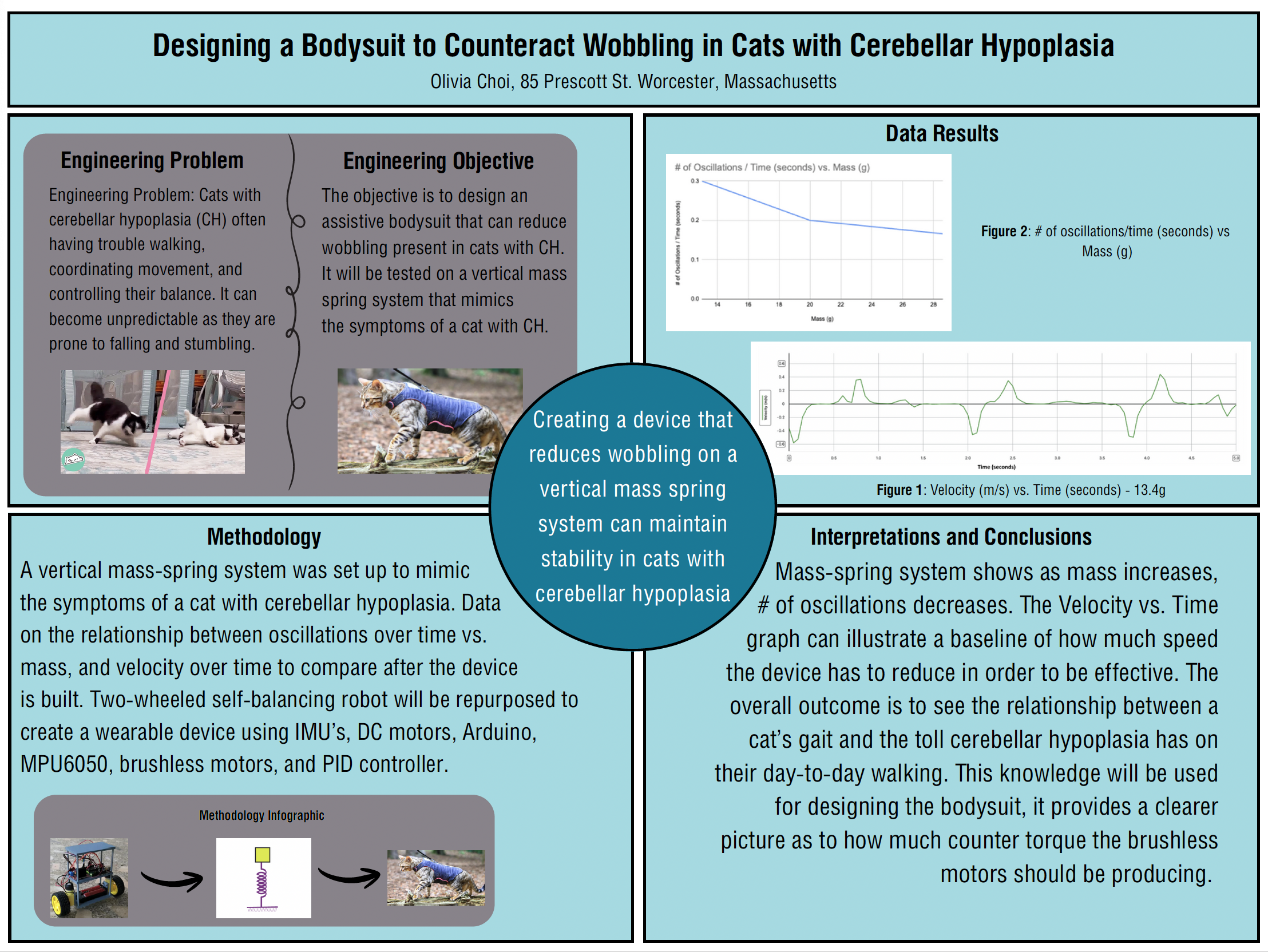
The image above is my Quad Chart, assigned by Dr. Crowthers, which gives an overview of my project. It includes preliminary data, research, and more insight into the specifics of my project.
Hover and click the image to view the PDF to get a closer look!
This project created a wearable assistive device through the use of an Arduino, an MPU6050, brushless motors, electronic speed controllers (ESCs), and one set of 1 rechargeable lithium polymer batteries with 1000mAh capacity and 7.4 voltage. This could reduce the number of oscillations a cat with cerebellar hypoplasia experienced on an everyday basis, optimizing their level of independence and allowing for more cats with CH to be adopted. Although there were some challenges, including a difficulty with my Arduino and a broken battery, they were able to be overcome and produce a successful assistive device.
Currently, cerebellar hypoplasia is one of the most common neurological conditions present in cats across the world. This condition can cause gait abnormalities and wobbling movements which can decrease the likelihood of these cats becoming adopted. Assistive devices are crucial for increasing adoption rates as a reduction in this side-to-side movement mitigates the requirements needed to adopt a cat with cerebellar hypoplasia. This study addresses wobbling, a symptom where the body moves uncontrollably from side-to-side, by engineering a wearable bodysuit to stabilize the body that allows these cats to be more independent without needing constant assistance from their owners. This study was simulated through a vertical-spring system and a stuffed animal, the spring mimicking the unpredictable symptoms of a cat with cerebellar hypoplasia. The structure of this device was constructed using nylon webbing, breathable air-mesh, and Velcro straps for adjustment with different cat sizes. This device primarily uses an MPU6050, an IMU chip that combines a 3-axis accelerometer and 3-axis gyroscope to measure linear acceleration and angular velocity, to detect motion and send signals to the electronic speed controllers. The electronic speed controllers regulate the speed and direction of the two brushless motors to allow for proportional speed and in this case, counter-torque for the side-to-side movement in a cat with cerebellar hypoplasia. This device has a success rate of ~56% suggesting that an IMU-based dampening system is effective in combating wobbling in cats with cerebellar hypoplasia.
Click HERE to read supplemental documents to the project!
Cats with cerebellar hypoplasia (CH) often having trouble walking, coordinating movement, and controlling their balance. These factors can limit stability and increase the risk of injury during movement.
The objective is to design an assistive bodysuit that can reduce wobbling present in cats with CH. It will be tested on a vertical mass-spring system that mimics the symptoms of a cat with CH.
The need of the project derives from cats with cerebellar hypoplasia (CH) often having trouble walking, coordinating movement, and controlling their balance. Cerebellar hypoplasia in cats is primarily caused by the feline panleukopenia virus (FPV), the overall prevalence being 22.9% for cats contracting the virus (Kabir et al., 2023). Although 74.34% of cats have at least one vaccination present in their immune system, it is one of the easiest viruses to spread as it is transferable through handling, food, bedding, and litter boxes (Bloodworth et al., 2024). As they grow, the wobbling can become unpredictable because they are prone to falling and stumbling, so having an assistive bodysuit to help them control their movement more to improve proprioception, the body’s sense of its own current position, movement, and action, can reduce the number of wobbles they have. Through oscillations, percentage of mechanical recovery, and diagonality of a mass-spring system, it can improve proprioception, providing this bodysuit can allow the brain to produce a clearer image of their surroundings (P-Themes, n.d.).
The materials in my independent research project are shown in Figure 1, consisting of one Arduino Uno, two 1104 model aircraft brushless motors, one MPU6050, two Acxico 10A brushless electronic speed controllers, one set of 1 rechargeable l ithium polymer batteries with 1000mAh capacity and 7.4 voltage, jumper wires, one laptop, stereo mesh fabric, and nylon webbing. To connect these electrical components, soldering tools such as the soldering iron, wire, and helping hands were used, as well as a heat gun for shrink wrap post-soldering. For the Arduino and breadboard components, the MPU6050 was soldered onto the breadboard so the device could detect angular velocity and tilt in real-time. Similar libraries to those used in self-balancing robots were downloaded – MPU6050 and I2Cdev by Jeff Rowberg. Once completed, the Arduino code to test the MPU6050 was coded. The Serial Monitor in Figure 2 represents the angular tilt and acceleration of the sensor, providing the user with ‘wobbling information’ in real-time. To develop the counter torque needed to reduce the wobbling in cats with cerebellar hypoplasia, two small 1104 model aircraft brushless motors were purchased, along with two Acxico 10A brushless electronic speed controllers (ESCs), and one set of 1 rechargeable lithium polymer batteries with 1000mAh capacity and 7.4 voltage as stated in the materials section. Prior to the soldering process, heat shrink was slid onto the wire of the ESC and brushless motor before soldering and the thermoplastic tubing did not shrink until after the wiring and programming was complete. The brushless motors were soldered onto the ESCs in order for them to control how much counter torque is being produced based on the data being provided by the Arduino. As both ESCs require a power source, the wires which connect to the battery become soldered together. Subsequently, the one set of rechargeable lithium polymer batteries with 1000mAh capacity and 7.4 voltage connected to the ESCs through a lever connector, acting as the on-and-off switch and allows for easy connection without needing to directly solder them together. Then, the wires of the ESCs were adjusted to be connected to the Arduino. After the electrical components were completed, the bodysuit was constructed through use of stereo mesh fabric, and nylon webbing. Once the device was finalized, its graphs were created through the use of Vernier Graphical Analysis.
Prior to this research project, engineers have designed wheelchairs to combat the mobility issues present in cats with CH. These wheelchair carts were fabricated using PVC pipes and joints, neoprene, a versatile synthetic rubber, and a PLA filament for 3D printed parts, a biodegradable thermoplastic that is used in high detail 3d prints. This cart prevents the swaying/wobbling of the cats with CH due to having the sides of the cart being snug to their body while still allowing for free movement. All the attachments are detachable, the harness is created with soft, breathable fabric, and also contains Velcro that attach to the sides to the cart (Chang, 2024). This model is very well created and allowed easy access for cats with CH. However, although this is a device that allows for free movement, it does not allow for cats with CH to go up and down stairs, jump on top of anything, or bend down to eat without being taken out of the cart. I strive to design a device that will decrease the dependency that cats with CH rely on their owners for through repurposing the components of a self-stabilizing robot to be on their bodies, not supported from the floor.
The results from Figure 1 indicated that wobbling occurred consistently for 16 seconds. But shortly after the device was turned on and applied, the number of oscillations in Figure 2 subdued to 7 seconds, indicating the effectiveness in an IMU-based dampening system. Conceptual components gathered from a self-balancing robot were successfully reapplied to create feedback that slowed down the impact wobbling has on cats with cerebellar hypoplasia. A 56% change occurred in velocity vs. time, illustrating its slower time and faster stabilization.
This project successfully developed an assistive device that reduced the number of oscillations a cat with cerebellar hypoplasia experienced while still providing free movement. This journey was essential to revolutionizing adoption for cats with cerebellar hypoplasia. Reducing these wobbles allows for less frequent check-ups at the vet and reduces healthcare expenses. It also increases overall health and well-being through constant movement, the body gains the exercise it needs while lowering its dependency on its owner. Although this device will be most effective towards the walking movement in cats with cerebellar hypoplasia, it could potentially benefit cats who have issues with vertical movement. The bodysuit could be tested with how jumping impacts the oscillations and gait metrics, ensuring no overcorrection or sudden torque spikes when accelerating vertically. This project could also expand the investigation by conducting testing on an authentic cat with CH, determining if their gait is affected the same way as the mass-spring system.