During the second half of the year, students begin their Assistive Technology (AT) projects. I was the CIO for Super Stemmers, and I worked with Ravena Arun (CEO), Maria Mishechkina (CMO), and Anika Sivasankar (CTO).
Navigating stairs with a traditional walker is a huge problem faced by mobility-aid walker users, as walkers cannot securely rest on individual steps. This limitation forces them to rely on constant assistance from caregivers, compromising their independence and increasing the caregivers’ workload. The lack of a suitable stair-friendly walker shows the urgent need for a safer and more efficient design to restore autonomy and reduce the physical and emotional strain on both users and caregivers.
SureStep was developed to address the challenge of navigating stairs with a walker. The design focused on creating a stable, adaptable, and user-friendly solution that could be incorporated into existing walkers at a low cost. The chosen design utilizes a linear actuator for leg adjustment, ensuring compatibility with various stair dimensions. Additional features, such as button-controlled retraction and an ultrasonic sensor for automation, were implemented to maximize ease of use and safety. Each prototype iteration was evaluated against functional, safety, and cost-effectiveness criteria to ensure it met the needs of our client.
The SureStep walker was iteratively developed through the evaluation of four distinct designs:
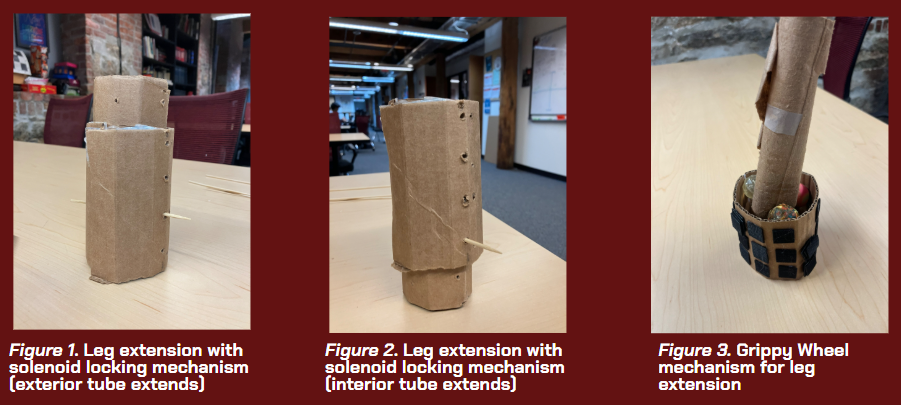
(1) Leg Extension with Solenoid Locking Mechanism (Exterior Tube Extends): This design tested a solenoid-locking mechanism to extend the walker’s legs but was discarded due to limited adaptability to stairs of varying heights.
(2) Grippy Wheel Mechanism for Leg Extension: This approach incorporated rolling mechanisms for smoother movement but lacked the necessary stability and safety features.
(3) Leg Extension with Solenoid Locking Mechanism (Interior Tube Extends): By reversing the extension mechanism, this design improved weight-bearing stability. However, the need for a new walker frame exceeded the budgetary constraints.
(4) Attachment with Button-Controlled Retraction: A linear actuator provided adjustable leg lengths, supporting up to 300 pounds without additional locking mechanisms. A button-based control system enabled easy operation for stair navigation, making this design the most viable for real-world use.
The final SureStep prototype is a practical and easy-to-use walker designed to help users navigate stairs safely and independently. It uses adjustable legs made up of linear actuators, which can be controlled with a simple button or automatically adjusted with the help of an ultrasonic sensor. Lightweight and foldable, the walker is stable on all kinds of surfaces, thanks to its secure rubber feet. All the electronics are neatly tucked into a small compartment, making the walker both convenient and reliable for everyday use. The poster below includes a photo of final prototype!