HiTechnicCompass Class Reference
#include <HiTechnicCompass.h>
Inheritance diagram for HiTechnicCompass:
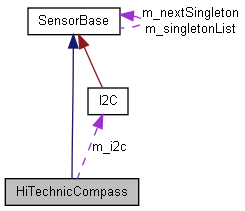
Collaboration diagram for HiTechnicCompass:
Public Member Functions | |
| HiTechnicCompass (unsigned slot) | |
| virtual | ~HiTechnicCompass () |
| float | GetAngle (void) |
Detailed Description
HiTechnic NXT Compass.This class alows access to a HiTechnic NXT Compass on an I2C bus. These sensors to not allow changing addresses so you cannot have more than one on a single bus.
Details on the sensor can be found here: http://www.hitechnic.com/index.html?lang=en-us&target=d17.html
- Todo:
- Implement a calibration method for the sensor.
Constructor & Destructor Documentation
| HiTechnicCompass::HiTechnicCompass | ( | unsigned | slot | ) |
Constructor.
- Parameters:
-
slot The slot of the digital module that the sensor is plugged into.
| HiTechnicCompass::~HiTechnicCompass | ( | void | ) | [virtual] |
Destructor.
Member Function Documentation
| float HiTechnicCompass::GetAngle | ( | void | ) |
Get the compass angle in degrees.
The resolution of this reading is 1 degree.
- Returns:
- Angle of the compass in degrees.
The documentation for this class was generated from the following files:
- C:/WindRiver/workspace/WPILib/HiTechnicCompass.h
- C:/WindRiver/workspace/WPILib/HiTechnicCompass.cpp