Victor Class Reference
#include <Victor.h>
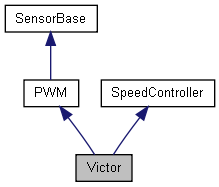
Inheritance diagram for Victor:
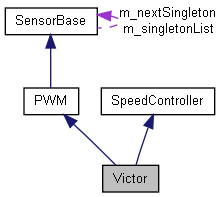
Collaboration diagram for Victor:
Public Member Functions | |
| Victor (unsigned channel) | |
| Victor (unsigned slot, unsigned channel) | |
| void | EnableDeadbandElimination (bool eliminateDeadband) |
| void | Set (float value) |
| float | Get (void) |
Detailed Description
IFI Victor Speed ControllerConstructor & Destructor Documentation
| Victor::Victor | ( | unsigned | channel | ) |
| Victor::Victor | ( | unsigned | slot, | |
| unsigned | channel | |||
| ) |
Member Function Documentation
| void Victor::EnableDeadbandElimination | ( | bool | eliminateDeadband | ) |
Optionally eliminate the deadband from the Victors.
- Parameters:
-
eliminateDeadband If true, set the motor curve on the Victor to eliminate the deadband in the middle of the range. Otherwise, keep the full range without modifying any values.
| void Victor::Set | ( | float | speed | ) | [virtual] |
Set the PWM value.
The PWM value is set using a range of -1.0 to 1.0, appropriately scaling the value for the FPGA.
- Parameters:
-
speed The speed value between -1.0 and 1.0 to set.
Implements SpeedController.
| float Victor::Get | ( | void | ) | [virtual] |
Get the recently set value of the PWM.
- Returns:
- The most recently set value for the PWM between -1.0 and 1.0.
Implements SpeedController.
The documentation for this class was generated from the following files:
- C:/WindRiver/workspace/WPILib/Victor.h
- C:/WindRiver/workspace/WPILib/Victor.cpp