Fair Poster
.jpg)
Dr. Crowthers' STEM II class begins partway through C term. The focus is on an Assistive Technology Project, where students collaborate in groups of four to five to identify a real-world challenge within the community. Each team works to design and build a device that addresses their chosen need. Leadership roles such as CEO, CTO, CIO, and CMO are assigned based on student applications, allowing each member to contribute in a meaningful way. After roughly three months of development, students present their final products at the STEM II Fair in May, highlighting the creativity and problem-solving skills of the entire class.
Surestep: A Walker Designed to Help Individuals with Walkers to Travel Up and Down Staircases with Ease
Client X is an elderly individual who uses a walker to move around their home and enjoys going on walks outside. However, a few short steps at the front of their house make it difficult for them to navigate independently. Their current walker does not support stair use, requiring them to rely on a caregiver for assistance every time they want to go out. This limits their sense of autonomy and makes simple daily activities feel burdensome. To support their desire for more independence and safe mobility, there is a need for a walker that can assist them in ascending and descending stairs without caregiver support.

This first design iteration features an exterior tube with a grippy wheel locking mechanism. The concept uses friction from multiple rubber-like grippy wheels to hold the walker leg in place while ascending or descending stairs. It was designed to be low-cost, accessible, and energy-efficient, making it easy to integrate into existing walker models. However, during testing, it was found that this design did not generate enough friction to securely support users over 300 lbs, which limited its reliability and safety for heavier individuals.
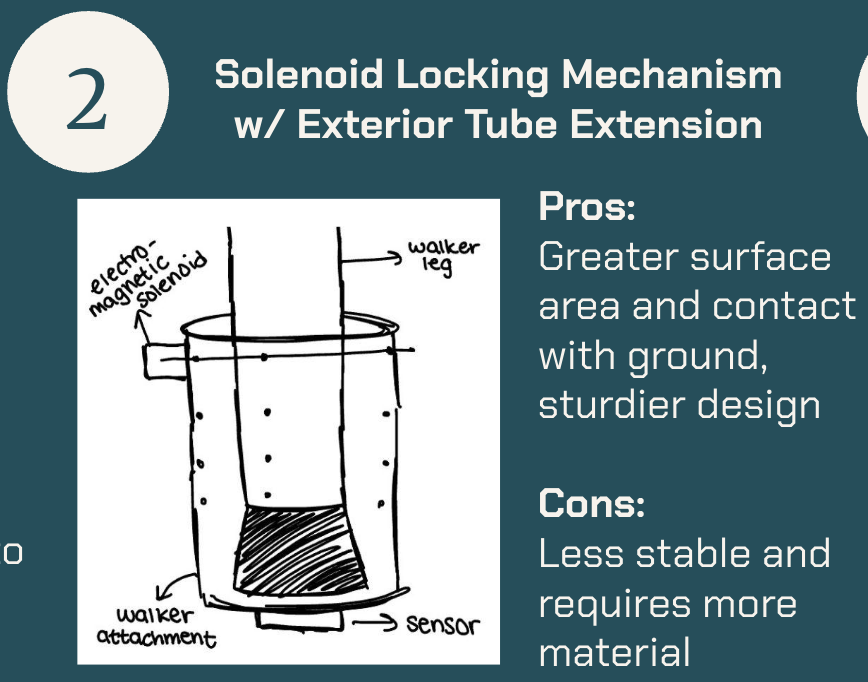
This second design iteration introduces a solenoid locking mechanism combined with an exterior tube extension. An electromagnetic solenoid is used to control the locking and release of the walker leg, aiming to improve both reliability and responsiveness. The extended tube design increases the surface area in contact with the ground, resulting in a stronger and more stable support structure. While the design is sturdier than the first iteration, it is also less stable when in motion and requires more material, which could impact cost and ease of use.

This third design iteration uses a solenoid locking mechanism with an interior tube extension, improving on earlier concepts by keeping the extension within the walker leg for a more compact and integrated design. The electromagnetic solenoid locks and releases the leg securely, while the layout remains affordable, practical, and easy to implement. This version offers a good balance between functionality and simplicity. However, to ensure sufficient ground grip and overall stability, it requires a redesigned foot-end with a larger surface area, which adds complexity to the final design.
.png)