STEM II
More of being a scientist!
The basic premise for STEM II is that students work in groups to create an assistive device that addresses some sort of need in society. During this project, students engage in meaningful learning, as they work to cooperate with their group members by developing contracts and delegating responsibilities. Computer-Aided Design, 3D printing, statistics, arduinos, circuit boards, and other tools and devices are harnessed to create devices that help make life easier.
The Problem
Clients with age-related muscle degradation, physical disabilities, and driveways that are difficult to traverse often struggle with moving their trash bin to the curb for pickup.
Abstract
Many people suffer from difficulties with mobility and muscular strength due to age, disabilities, or other conditions. Taking out the trash is often difficult for people with such complications. The average American produces approximately 34 pounds of trash per week. Transporting this amount of waste would pose a significant challenge to people with the aforementioned conditions. However, taking out the trash provides quality exercise, which is essential for decreasing the rate of bone and muscle degradation. As such, this team’s goal is to create an electrically powered trash barrel that assists users in maneuvering their barrel while still allowing them to remain involved in the transportation process. In turn, the target audience will be able to continue taking out their own trash, which comes with the large benefits of perceived independence and exercise. In order to ensure a comfortable experience, the degree of assistance will be adjustable by the user, allowing them to customize the amount of labor the system subsidizes. Since the degree of muscular challenges may vary widely, especially with age and certain health conditions, this adjustability will be critical to ensure that this product maintains optimal utility.
Design Process
The device designed for this project was designed to ease the task of moving a trash bin for individuals who may have physical difficulty transporting their trash bin between their driveway and house. The prototype produced over the course of this project is able to successfully assist the user in taking out their trash. The prototype modifies a standard 64 gallon trash can to provide assistance in the form of motor power. The level of assistance and power can be controlled by the user via a potentiometer and two buttons. The controls are wired to an Arduino UNO which handles user input and PWM output to the motor controllers. The prototype was able to achieve the objective with minimal cost and modification to the standard trash barrel.
The power to the two motor controllers were wired in parallel to the battery, and each was connected to one motor. Then, one twisted pair of CAN/PWM wires was taken from each motor controller. The ground wires (green) were connected to the Arduino UNO’s Digital Output GND pin, and one 5V normally open button was attached to each yellow signal wire. This step required significant cable extension due to the mounting positions of the hardware. The signal wires were then both attached to the same PWM pin on the Arduino UNO. The 3-wire potentiometer was wired to the GND, 5V, and one of the Analog Input pins on the Arduino UNO. The Arduino was then connected to the battery pack via the usb port.
The code to operate the Arduino control system contains two major sections. The first reads the input from the user, which is provided through the potentiometer. The second major component outputs an appropriate PWM signal to the motor controllers (and, by proxy, the motors). In between these steps, the program manipulates the potentiometer signal to put it within a range of -100% to 100% of the desired power output where a negative number would move the motor in the opposite direction as a positive number. At zero there is no motor motion. The value is then converted into a binary wave using the Servo.h library where it is received by the Talon SRX motor controllers.
Before the implementation of the circuitry into the barrel, the existing wheel apparatus of the model provided by Casella had to be modified. First, the original axle was removed due to being too short to easily be harnessed to transfer power within the system. Instead, a longer copper pipe with the same outer diameter as the original axle was used. During this swap, both wheels and the old axle were removed, allowing for slots on the interior of the wheel bays, usually covered by the wheels, to be cut and allow clearance for the chain to go into the trash barrel. A pair of motors within holders were embedded into the floor of the internal portion of the barrel. A set of sprockets were connected to each motor directly, using 3D printed adapters. The chain connecting these internal sprockets within the barrel to the sprockets attached (concentric) to each wheel could then be placed into the system. When power is supplied, the motors turn their sprockets which rotate the chain connecting the motors to the wheel sprocket, resulting in rotation in the barrel wheels.
Design Apparatus
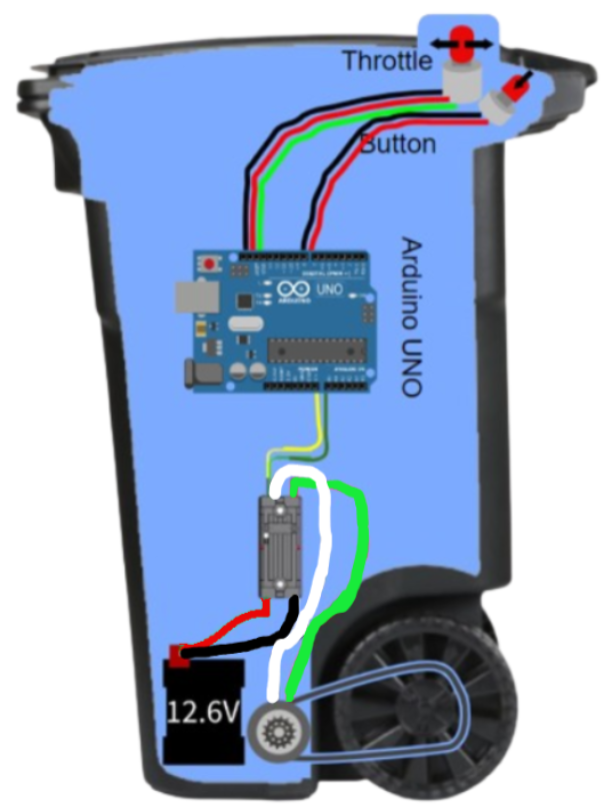
As a basic description of the device and how it is able to work, a battery is located at the bottom of the inside of the barrel. From this focal point extend two branches in the circuitry. The first one involves the potentiometer and the arduino system, and second one the motor controllers and motor. The user turns the potentiometer, which modifies the signal that the arduino sends to the rest of the circuit. This changes the amount of power that the motor controllers end up providing to the motor. In turn, the rotational velocity of the motor can be varied. Through a series of sprockets and chains, the wheels are attached to the motor, extending the variation in rotational velocity to them as well. In turn, the speed at which the barrel can travel varies. While the goal is not speed for this device, the generation of considerable sums of velocity provides the user with the variable power assist, thus achieving the goal of the device.
Assistive Technology Report
If you are unable to see the file, click here.
Assistive Technology Poster
If you are unable to see the file, click here.
A video of the barrel in action: