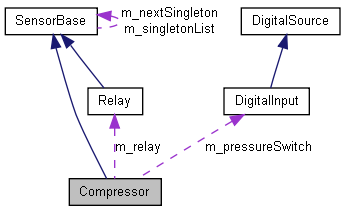
Compressor Class Reference
#include <Compressor.h>
Public Member Functions | |
| Compressor (unsigned pressureSwitchChannel, unsigned compressorRelayChannel) | |
| Compressor (unsigned pressureSwitchSlot, unsigned pressureSwitchChannel, unsigned compresssorRelaySlot, unsigned compressorRelayChannel) | |
| ~Compressor (void) | |
| void | Start (void) |
| void | Stop (void) |
| bool | Enabled (void) |
| unsigned | GetPressureSwitchValue (void) |
| void | SetRelayValue (Relay::Value relayValue) |
Detailed Description
Compressor object. The Compressor object is designed to handle the operation of the compressor, pressure sensor and relay for a FIRST robot pneumatics system. The Compressor object starts a task which runs in the backround and periodically polls the pressure sensor and operates the relay that controls the compressor.Constructor & Destructor Documentation
| Compressor::Compressor | ( | unsigned | pressureSwitchChannel, | |
| unsigned | compressorRelayChannel | |||
| ) |
Compressor constructor. Given a relay channel and pressure switch channel (both in the default digital module), initialize the Compressor object.
- Parameters:
-
pressureSwitchChannel The GPIO channel that the pressure switch is attached to. compressorRelayChannel The relay channel that the compressor relay is attached to.
| Compressor::Compressor | ( | unsigned | pressureSwitchSlot, | |
| unsigned | pressureSwitchChannel, | |||
| unsigned | compresssorRelaySlot, | |||
| unsigned | compressorRelayChannel | |||
| ) |
Compressor constructor. Given a fully specified relay channel and pressure switch channel, initialize the Compressor object.
- Parameters:
-
pressureSwitchSlot The module that the pressure switch is attached to. pressureSwitchChannel The GPIO channel that the pressure switch is attached to. compresssorRelaySlot The module that the compressor relay is attached to. compressorRelayChannel The relay channel that the compressor relay is attached to.
| Compressor::~Compressor | ( | void | ) |
Delete the Compressor object. Delete the allocated resources for the compressor and kill the compressor task that is polling the pressure switch.
Member Function Documentation
| void Compressor::Start | ( | void | ) |
Start the compressor. This method will allow the polling loop to actually operate the compressor.
| void Compressor::Stop | ( | void | ) |
Stop the compressor. This method will stop the compressor from turning on.
| bool Compressor::Enabled | ( | void | ) |
Get the state of the enabled flag. Return the state of the enabled flag for the compressor and pressure switch combination.
- Returns:
- The state of the compressor thread's enable flag.
| unsigned Compressor::GetPressureSwitchValue | ( | void | ) |
Get the pressure switch value. Read the pressure switch digital input.
- Returns:
- The current state of the pressure switch.
| void Compressor::SetRelayValue | ( | Relay::Value | relayValue | ) |
Operate the relay for the compressor. Change the value of the relay output that is connected to the compressor motor. This is only intended to be called by the internal polling thread.
The documentation for this class was generated from the following files:
- C:/WindRiver/workspace/WPILib/Compressor.h
- C:/WindRiver/workspace/WPILib/Compressor.cpp