PIDController Class Reference
#include <PIDController.h>
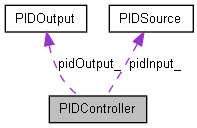
Collaboration diagram for PIDController:
Public Member Functions | |
| PIDController (float p, float i, float d) | |
| ~PIDController (void) | |
| float | Get (void) |
| void | SetContinuous (void) |
Detailed Description
Class implements a PID Control Loop.Creates a separate thread which reads the given PIDSource and takes care of the integral calculations, as well as writing the given PIDOutput
Constructor & Destructor Documentation
| PIDController::PIDController | ( | float | p, | |
| float | i, | |||
| float | d | |||
| ) |
Allocate a PID object with the given constants for P, I, D
| PIDController::~PIDController | ( | void | ) |
Free the PID object
Member Function Documentation
| float PIDController::Get | ( | void | ) |
Return the current PID result This is always centered on zero and constrained the the max and min outs
| void PIDController::SetContinuous | ( | void | ) |
Set the PID controller to consider the input to be continuous, Rather then using the max and min in as constraints, it considers them to be the same point and automatically calculates the shortest route to the setpoint.
The documentation for this class was generated from the following files:
- C:/WindRiver/workspace/WPILib/PIDController.h
- C:/WindRiver/workspace/WPILib/PIDController.cpp