Overview
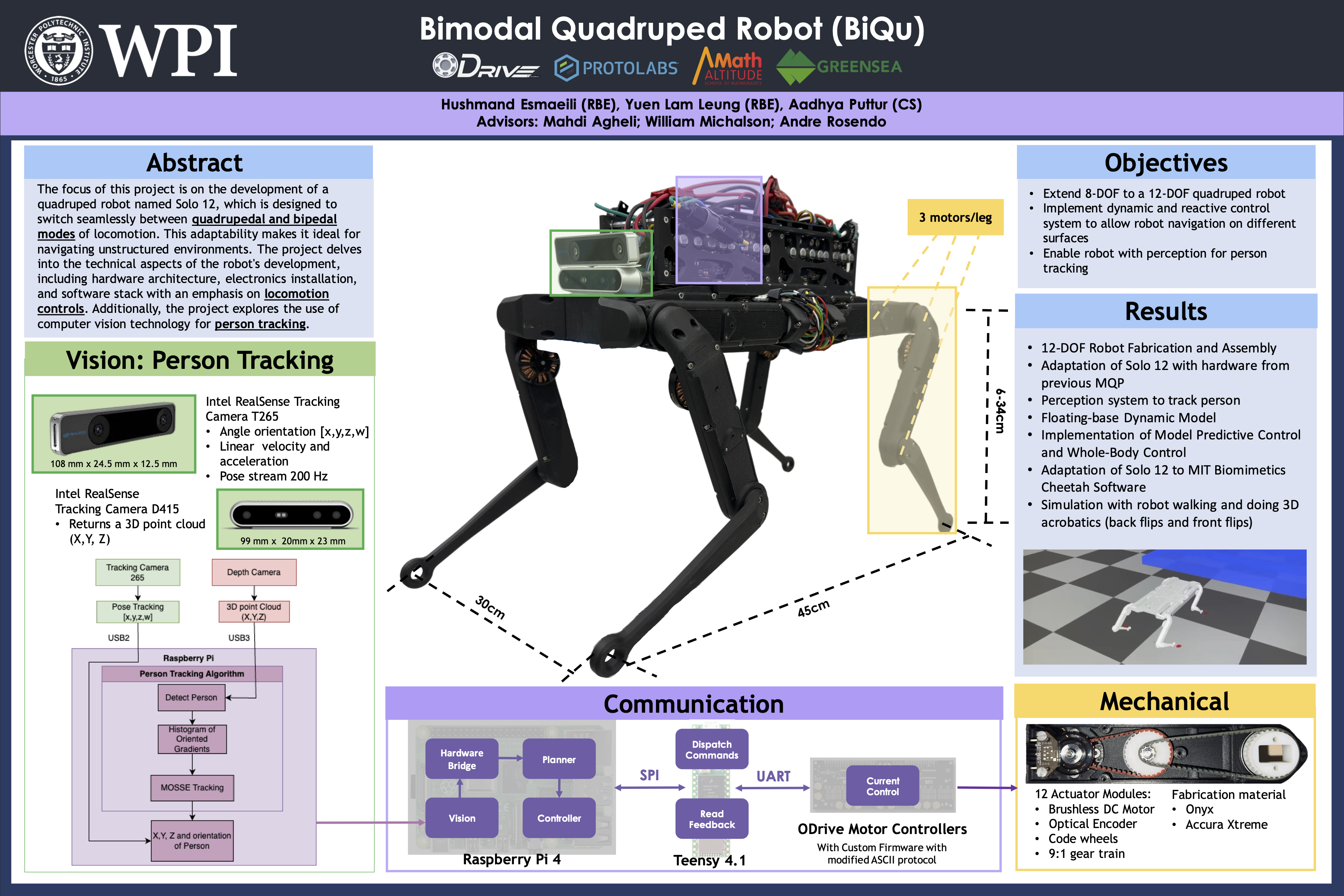
We successfully upgraded an existing 8-DOF quadruped robot to a 12-DOF system, resulting in enhanced mobility: changing orientation, adapting heightened surface. This involved the addition of extra joints and actuators to each of the robot’s legs, thereby increasing its range of motion and enabling more advanced forms of locomotion.
To adapt the unique hardware package passed down from the previous project, we developed communication module with multiple communication protocols to interface different hardware. After performing a lot of experiments and tweaking firmwares of the hardware, we were able to increase communication speed to match the required frequency of the control system, which will be discusses below.
In addition to the hardware enhancement, the project has implemented a dynamic control system that enables the reactive walking. This control system utilizes input from sensors and a series of model-based control method to adapt the robot’s gait and movement in real-time, leading to flexible locomotion and heightened stability across diverse environments.
Moreover, the project has successfully expanded the robot’s perception capabilities by integrating person-tracking functionality. We developed a separate vision module that take data from camera to facilitate person detection and tracking within its surroundings. This perception system would provide a foundation for developing wide ranges of features for human interaction.
Due to hardware constraints and limited resources, we were only able to implement motion on a single leg by the end of this year. For details, make sure to check out our report available here.
Our Presentation @ Project Presentation Day
We presented our methodlogy and result at the annual Project Presentation Day, which is now known as the Undergraduate Research Projects Showcase. You may view our presentation on Youtube.
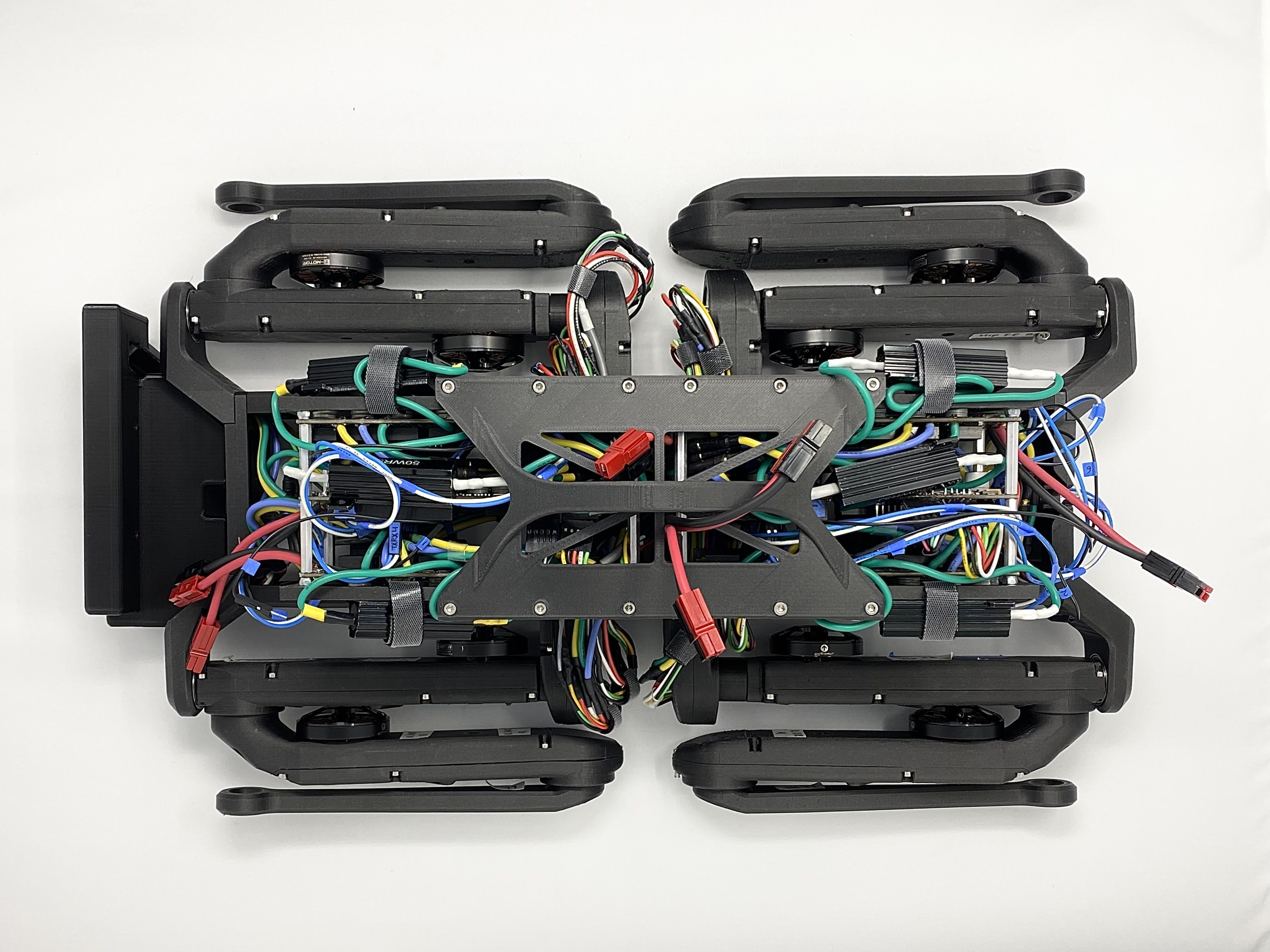
Top view of BiQu
BiQu in simulation environment