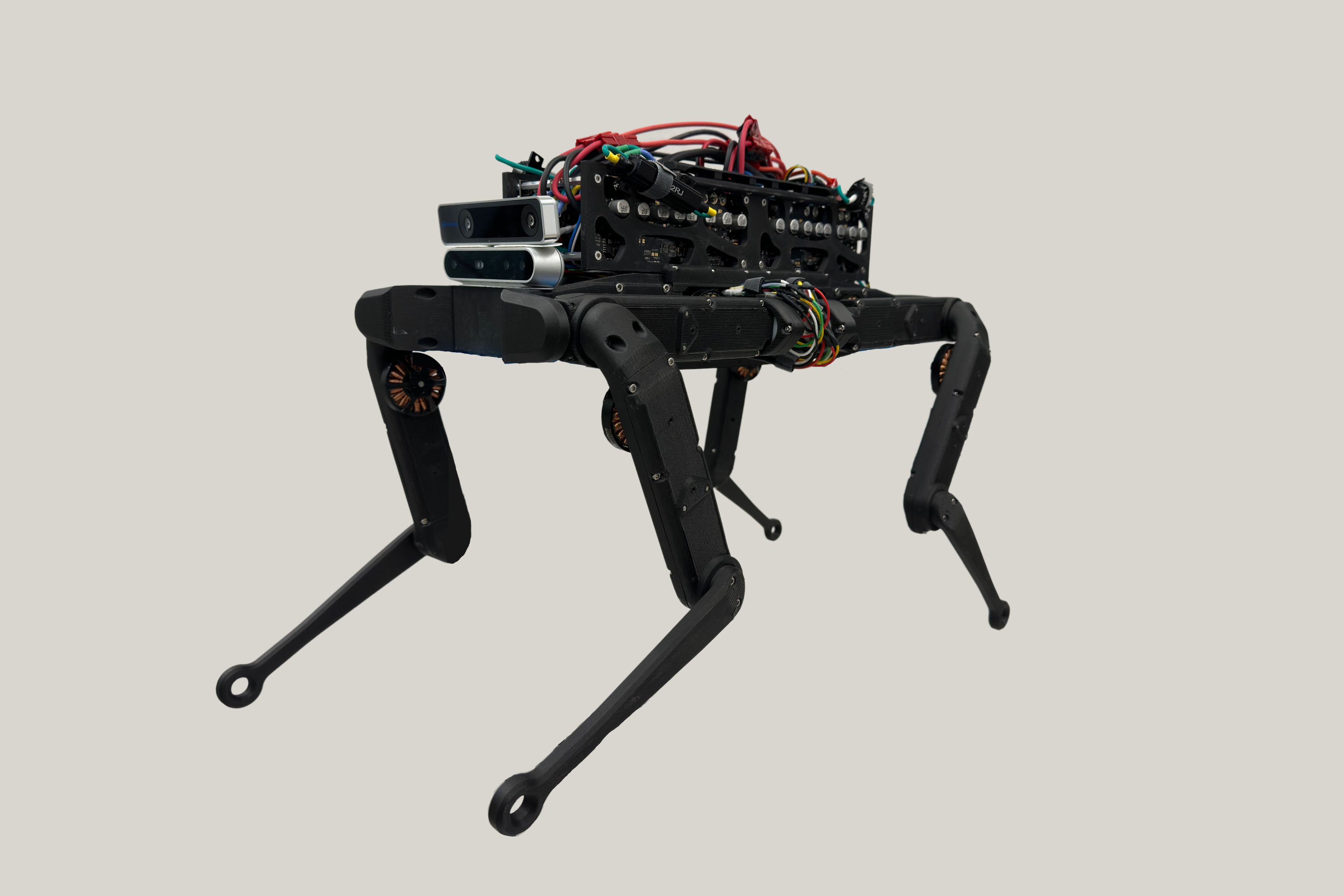
Bimodal Quadruped Robot
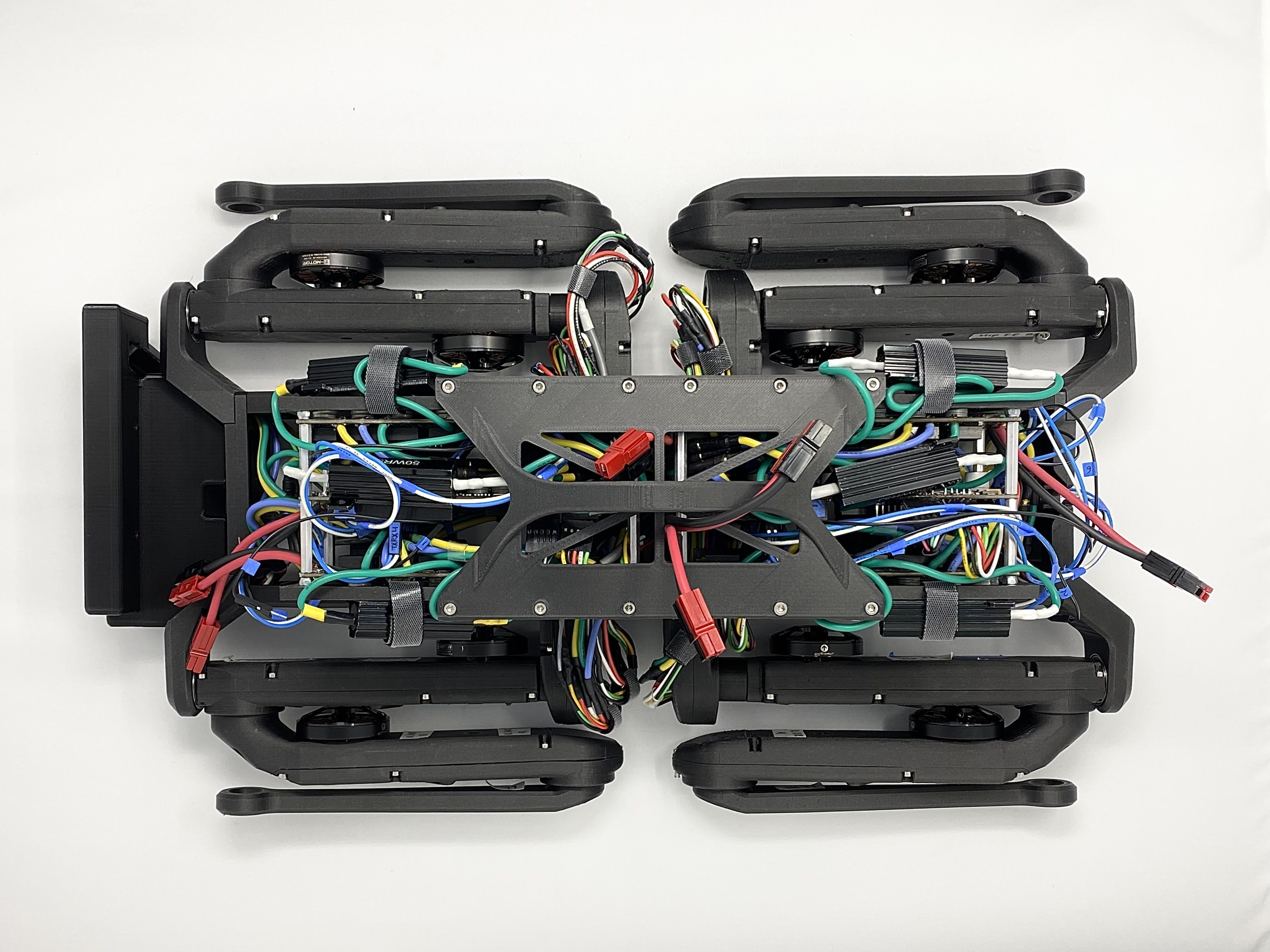
The focus of this project is on the development of a quadruped robot named Solo 12, which will be integrated to switch seamlessly between quadrupedal and bipedal modes of lo- comotion. This adaptability makes it ideal for navigating unstructured environments. The project delves into the integration of dynamic control system, technical aspects of the robot’s development, including hardware architecture, electronics installation, and software stack with an emphasis on locomotion controls. Additionally, the project explores the use of computer vision technology for person tracking.