| Project Title | Project Description | Opportunities |
|---|---|---|
HURON: Humanoid Robot

|
Category: Humanoid Robots; Design; Kinematics; Dynamics; Control This is a New Project! The project will be divided into Lower Body and Upper Body. Each sub-project requires a separate group of students. The lower body project is about designing and fabricating a bipedal mechanism that can walk and maintain its stability dynamically. The upper body project is about designing and fabricating an upper body that has a spine and can bend forward and backward. |
1 MS student (RBE or ME) |
| Bimodal Quadruped Robot
|
Category: Legged Robots; Trajectory/Motion Planning; Dynamics; Computer Vision; Control A quadruped robot with the capability of turning into a bipedal robot. The robot is already built and is able to walk on four legs. Current groups of students are working on the trajectory and control of robot to have the robot stand and walk on its two rear legs changing from quadruped mode. As part of this project, the robot will be equipped with computer vision to help with traversing uneven terrain where there are steps/stairs, obstacles, gaps, etc. |
1 MS student (RBE or ME) |
Balance Monitoring Insole
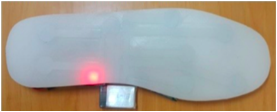 |
Category: Sensor; Design An insole that can sit inside the shoe (shoepad) and measure and monitor the balance of the person wearing it. There would be sensors, IMU, microcontroller, wireless module, PCB, and rechargable battery all wrapped insdie the silicone insole. Multiple versions of the this insole are already built, so good initial study is already available. The project includes defining a dynamic balance criterion to measure the stability level based off of the measured data. In addition, desing and fabrication of a magnetic soft force sensor will be a part of this project. |
1 MS student (RBE) |
| 6DOF mobile 3D printer
|
Category: Legged Robots; Trajectory/Motion Planning; Control; Programming A six-axis 3D printer - a hexapod walking robot that walks and prints parts larger than its own size! The robot is already built by another team, and the team is doing initial test prints using the robot. Future projects will include having the robot print complicated 3D parts, which cannot be printed using available regular 3-axis printers. The first step is to precisely print a 3D part when the robot is stationary. That is what this project is about. |
1 MS student (RBE) |
Bone-in Soft Hand
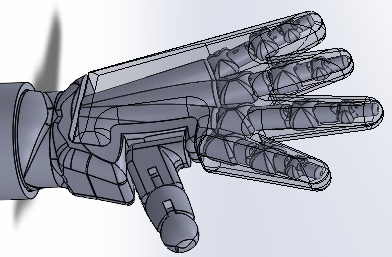 |
Category: Actuator; Design A soft hand with hard bones i.e. a hard hand with soft skin! This is an existing project. Students joining this project will be continuing the project by focusing on the actuation and implementing more degrees of freedom by improving the wrist capabilities or adding lateral finger motion. The hand will be tested on a robotic arm at the end of the project. |
1 MS student (RBE or ME) |