Finite Difference Methods
- Approximate the derivatives in the governing PDE using difference equations.
- They are useful in solving heat transfer and fluid mechanics problems.
- The methods work well for 2-D regions with boundaries parallel to the coordinate axes.
- However, they are cumbersome on curved and irregular shaped boundaries.
- It is difficult to write a general purpose computer program for the finite difference methods.
The Finite Element Method (FEM)
- Easily applied to irregular shaped objects
- Multiple materials (composites) are treated without difficulty.
- Mixed BCs can be applied
- General purpose codes for whole classes of problems can be written.
- The FEM combines several mathematical concepts to produce a system of linear or non-linear equations. It has little value without a computer since equations range from 20 à 20K or more.
- The FEM is less stable (generally) than the FD method and it provides an integrated overall average of the solution set rather than explicit values at distinct locations.
There are 2 standard FEM treatment techniques:
a.) The Variational Method, and
b.) Weighted Residual Methods
Using Calculus of Variation it can be shown that if:
1.) U = g(x) yields the lowest integration value of:
then
2.) U is the solution of the D.E.
with BCs U(0) = U0 and U(L) = UL
The
term:  is the approximate functional.
is the approximate functional.
This solution strategy is NOT
applicable for any D.E. containing first derivative terms. The variational approach originated in stress
analysis (during the 1950s) which involved even order derivatives only. (Fluid mechanics traditionally use FDM for
their solutions since the variational formulation was not valid for the
Navier-Stokes set of equations.)
The Method of Weighted Residuals
Takes the governing equations
, for example.
It
approximates U with ![]() . Generally, this replacement of U with a guessed
function is piecewise continuous, say
. Generally, this replacement of U with a guessed
function is piecewise continuous, say
![]()
Where Uj are undetermined coefficients and Nj are the basis functions - which the user specifies or chooses.
Since ![]() does not satisfy the
D.E. an error or residual results, i.e.,
does not satisfy the
D.E. an error or residual results, i.e.,
The method of WR requires that this residual, when multiplied by a Weighting function, W, and summed over the region be zero.
òWR dx = 0
What we use for ![]() and W distinguishes
the various forms of MWR
and W distinguishes
the various forms of MWR
![]()
![]() Recall:
Recall: 
is the definition of an inner product
Hence, if òWR dx = 0, it implies that R is orthogonal to W
The  has i weight functions
(1 for each node, in our case, or degree of freedom in system, formally)
has i weight functions
(1 for each node, in our case, or degree of freedom in system, formally)
The common WR methods are:
i Collocation
ii Subdomain
iii Least Squares
iv Galerkin
i.) Collocation => let Wi (x) = d( x- xi)
Then 
= R(x) for x = xi
This requires that R(x) = 0 at specific points and if
The number of points = number of undetermined coefficients \ a solution is available.
Ex:
Let D = EI ( resistance of the beam to deflection)
Q = - M (the moment)

The solution of U = y displacement;
F.E.M.
![]()
Where Uj are undetermined coefficients and
Let Nj = basis function
=  or many other
possible basis fxns
or many other
possible basis fxns
Ex. Lagrange Polynomials applied locally on each element

![]()
Exact Solution = 
Collocation:
Trial
fxn: U ~ Û
=
= Uj  where Xj =
j*Dx
where Xj =
j*Dx
Plug into O.D.E.
 - Mx = R(Xj)
- Mx = R(Xj)
Multiply by weighting fxn and integrate over Domain
Let Xi = L/2; Then
 - M0 = 0
- M0 = 0
Solve for the unknown coefficient Uj
which
multiplies the basis function for the final approximation of ![]()
ii) Subdomain
-
 |
Assume only 1 domain i.e.
Same R(Xj) as with collocation
![]()
iii) Galerkin:
Let Wi=Nj
=
 dx = 0
dx = 0
Solving ,
 same as Variational
Method
same as Variational
Method
iv) Least Squares:
Error=![]()
Minimize
; ![]()
Variational Method:
P= dx
dx
approximate
P=

Minimize:
![]()

A small spreadsheet of the various methods:
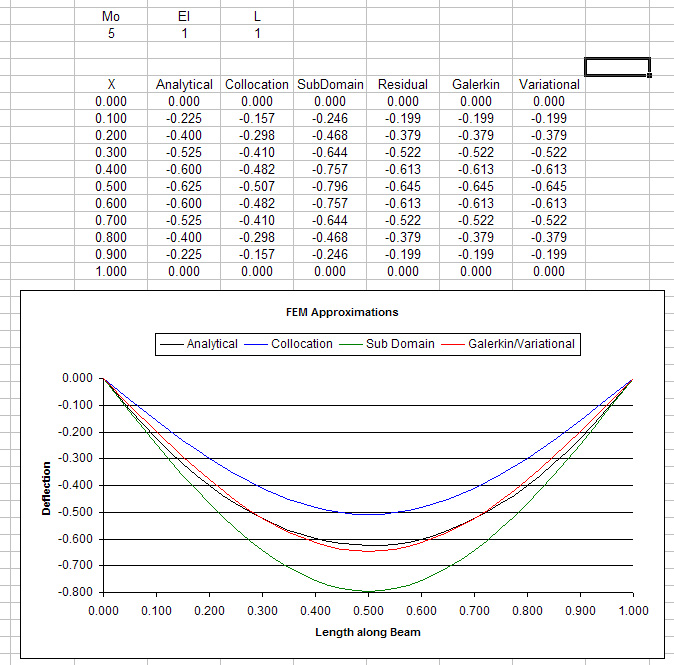
FEM SOLUTION STRATEGY
Variational Approach Method of Weighted Residuals
Conservative Systems Use the PDE directly
Potential Energy of system Guess a solution to U
is Stationary Apply a weighting fxn
 Integrate
Integrate
Functional Require Residual to be
Integrate Zero Globally
Algebraic Set of Equations
Apply Boundary Conditions
Matrix Solver
Solution