Research > Developing a full-body human-like robot
We have been continuously developing a humanoid robot that resembles human anatomy, is cost-effective, and can serve as a solid platform for applying advanced control algorithms.
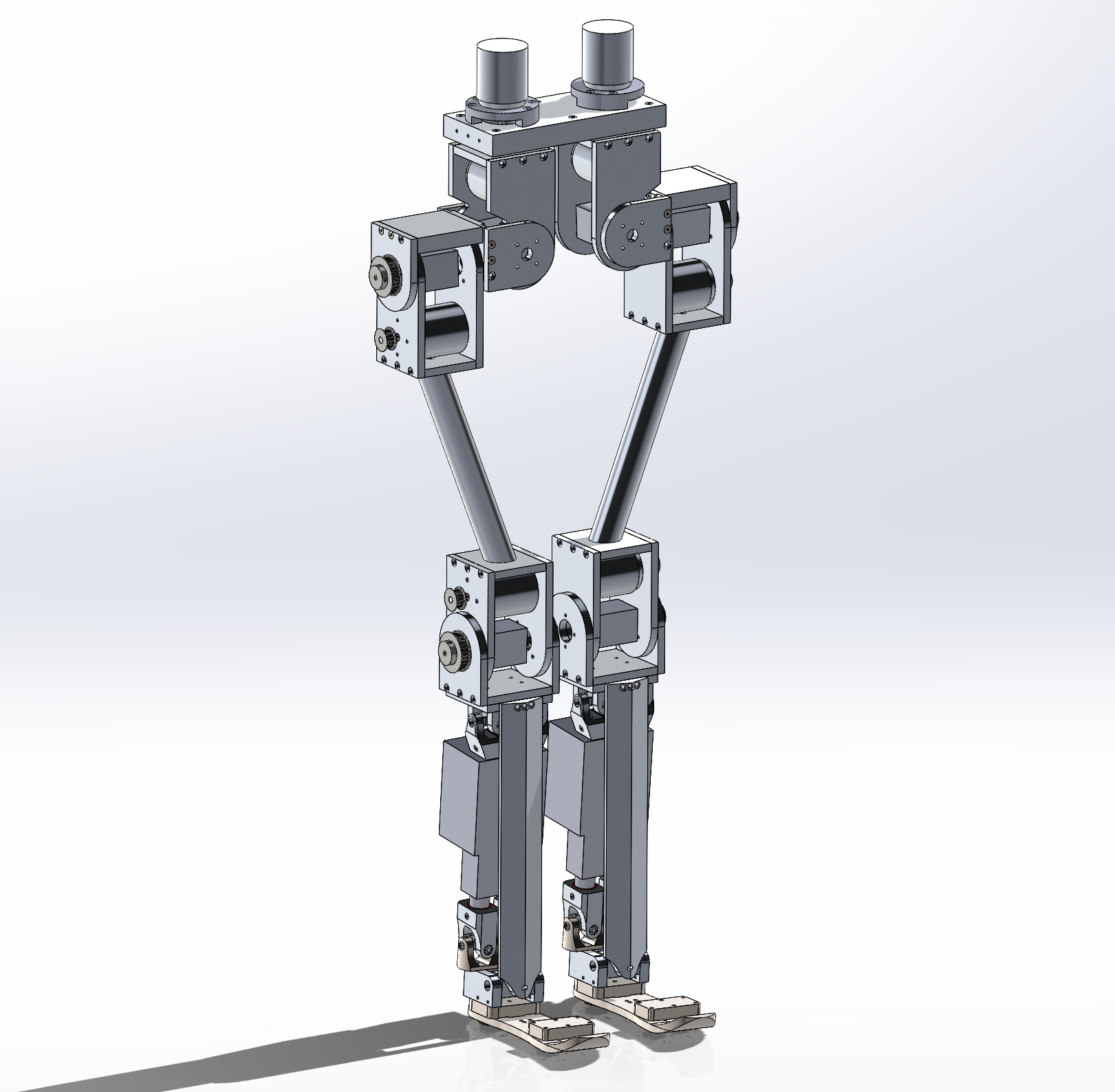
The lower body of the HURON humanoid stands about 47 inches (1.2 m) with the weight about 88 lbs (40 kg). For perception, the robot has 8 Force Sensitive Resistor (FSR) sensors at the bottom of its feet. Each limb contains 6 degrees of freedom to represent human anatomy. The robot features high-power BLDC motors and high-ratio strain wave gearboxes. The upper-body part of the robot is currently in development.
Currently, we are designing the 3rd version of the ankle joint with the core being the four-bar mechanism and the use of harmonic drives. The goal of this version is to closer match the human leg shape and reduce the cost of materials.
HURON Versions
HURON v1
First version of HURON, which has linear actuators for the ankle joint. This version was manufactured in 2022 & 2023.
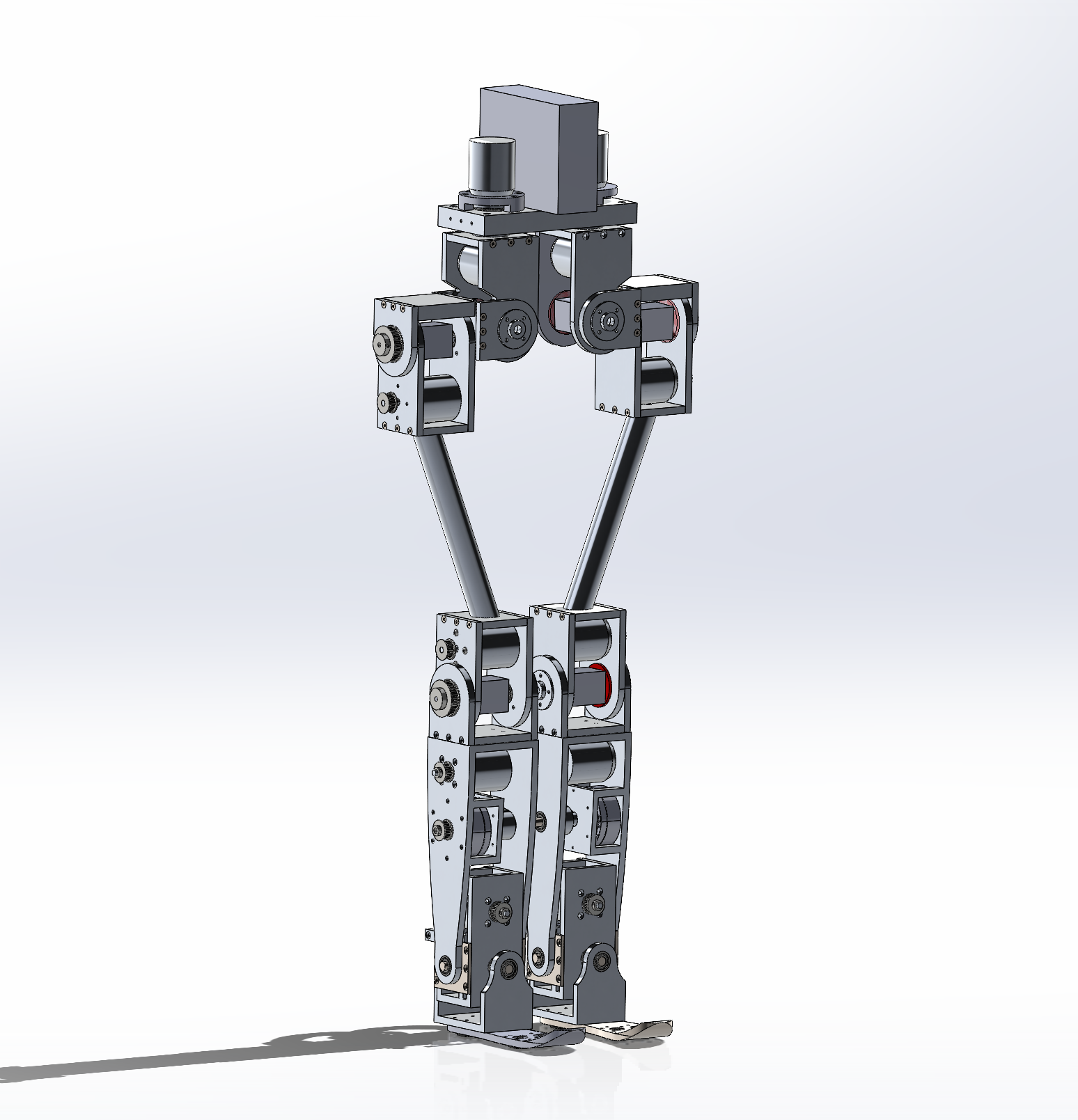
HURON v2
First revision of HURON, which switches to the use of brushless DC motors and harmonic drives to provide higher reaction speed and torque for the ankle joint.